






自动驾驶控制-动力学跟踪误差模型LQR算法路径跟踪仿真
复现百度apollo的横向控制
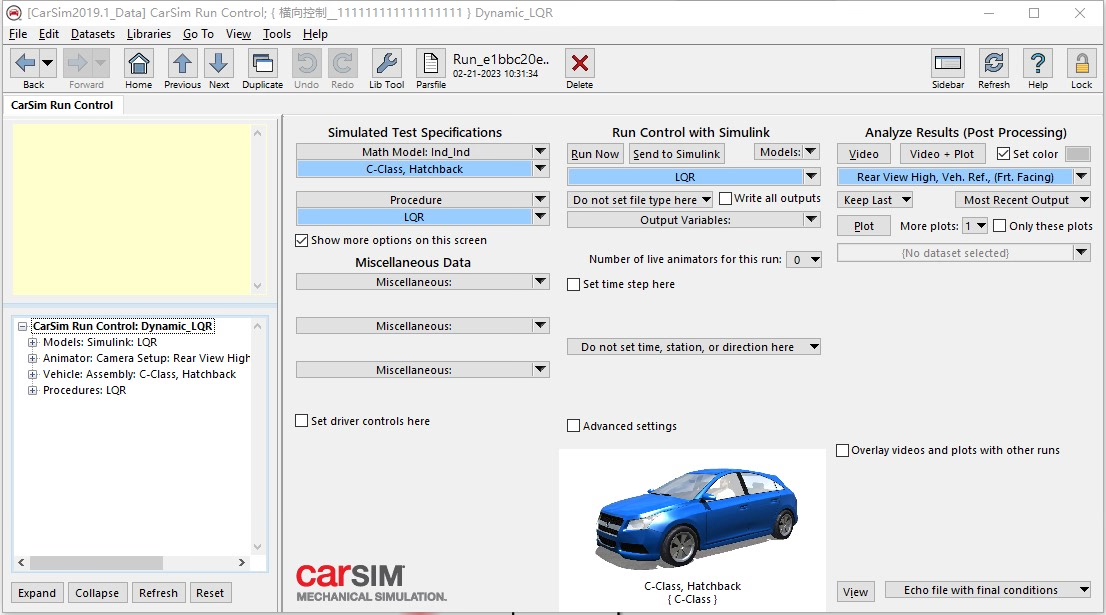
matlab/simulink和carsim联合仿真,动力学跟踪误差模型实现的前馈 反馈lqr横向控制,可以跟踪双移线,圆形,五次多项式以及各种自定义路径,相比运动学模型车速更高,更实用。
跟踪效果完美。
有离线计算反馈矩阵K矩阵和在线计算K矩阵两种。
可以提供前轮转向/后轮转向/四轮转向三种模型,具体看你需要哪个请指定
YID:2350704812271863
阿Xin的自动驾驶小店
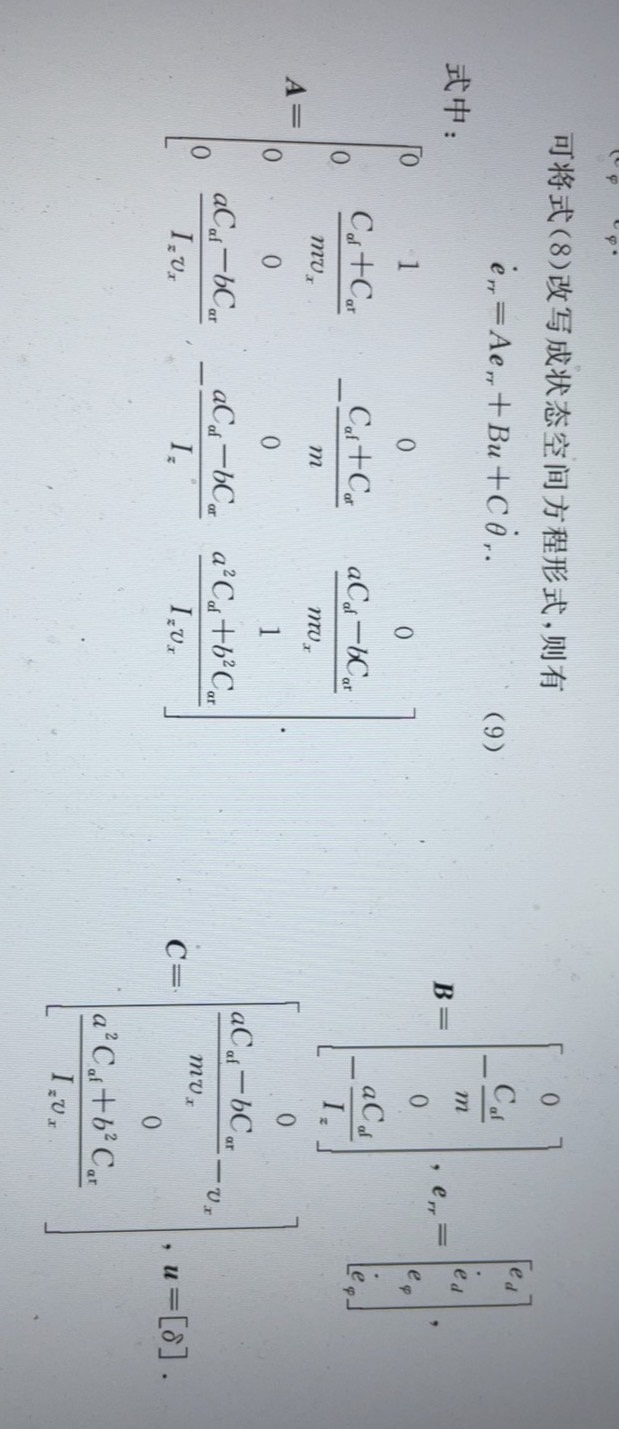
自动驾驶技术在近年来得到了快速的发展和应用,其中横向控制是自动驾驶系统中至关重要的一环。本文将介绍一种基于动力学跟踪误差模型和LQR算法的路径跟踪控制方法,并结合MATLAB Simulink和CarSim软件进行联合仿真,通过复现百度Apollo的横向控制来验证该方法的有效性。
在自动驾驶中,路径跟踪是实现车辆在预定路径上行驶的关键任务。动力学跟踪误差模型是一种常用的路径跟踪方法,它通过建立车辆的动力学模型,在每个时间步中计算车辆与期望轨迹之间的误差,并通过控制器对车辆进行调整,使其能够尽可能地贴合期望轨迹。
本文所提出的横向控制方法使用了LQR算法,该算法是一种基于状态空间模型的最优控制方法。在路径跟踪中,LQR算法可以通过最小化控制输入和状态误差的加权和来求解最优控制输入,从而实现车辆的稳定跟踪。
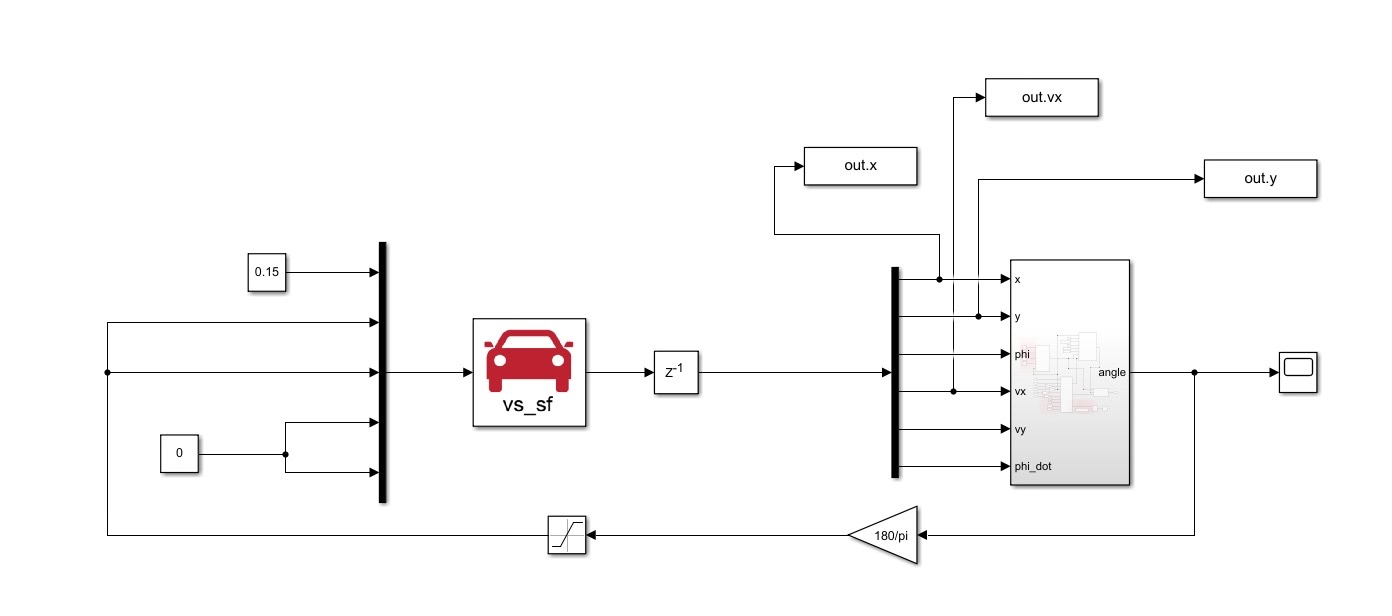
为了验证该方法的有效性,本文采用MATLAB Simulink和CarSim软件进行联合仿真。在仿真过程中,首先需要建立车辆的动力学模型,并制定一条期望轨迹。然后,通过仿真软件将车辆的实际轨迹与期望轨迹进行比较,计算出动力学跟踪误差,并使用LQR控制器进行调整,使车辆能够尽可能地贴合期望轨迹。
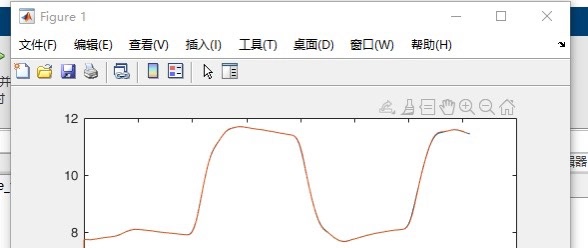
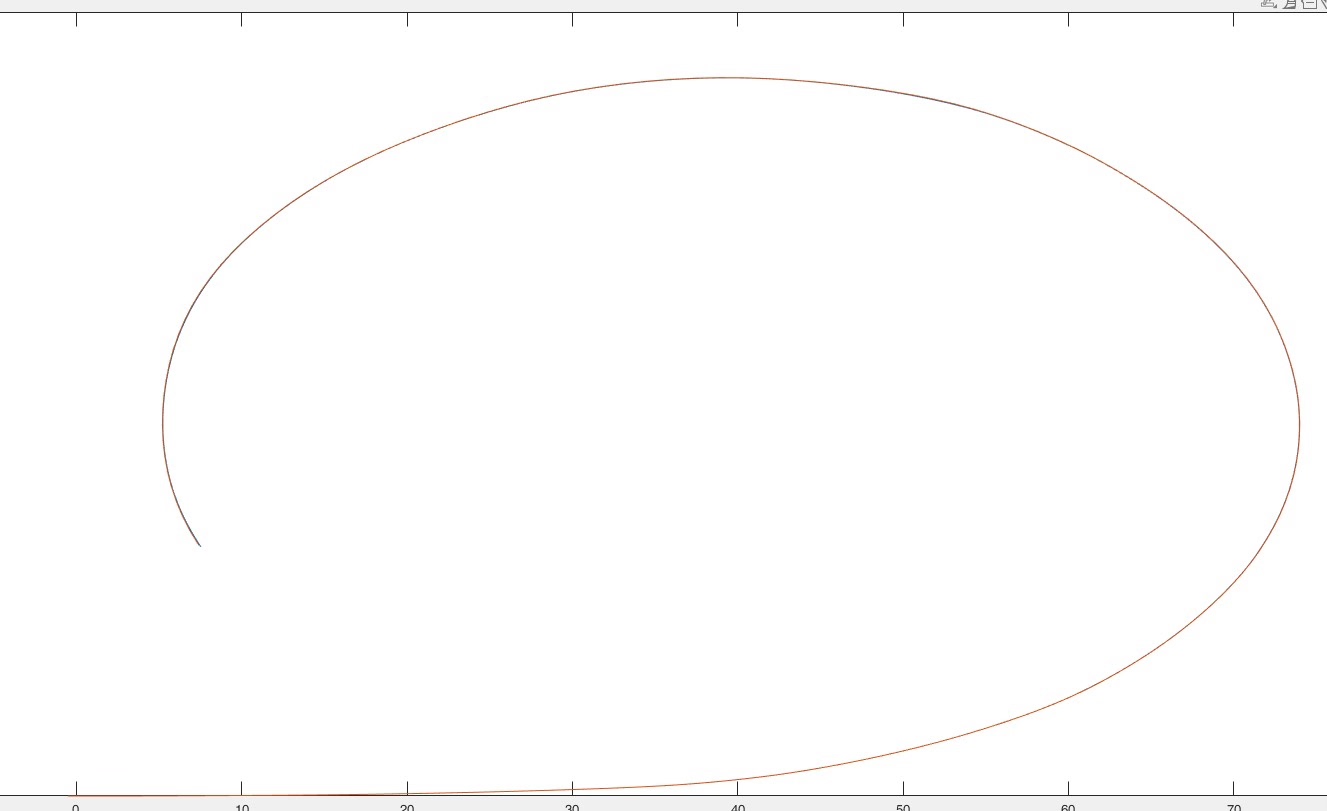
在仿真结果中,本文采用了双移线、圆形、五次多项式等不同类型的路径进行测试,并进行了多次重复实验。实验结果表明,所提出的横向控制方法能够有效地跟踪各种类型的路径,并且具有较高的稳定性和鲁棒性。
除了离线计算反馈矩阵K矩阵的方式,本文还提出了一种在线计算K矩阵的方法。离线计算可以提前得到一个稳定且较优的控制器,但不能适应实时变化的环境和车辆状态。在线计算则可以根据当前的环境和状态信息,实时调整控制器参数,从而获得更好的跟踪效果。
在实际应用中,本文还提供了前轮转向、后轮转向和四轮转向三种模型供选择。前轮转向模型适用于一般道路条件下的车辆,后轮转向模型适用于低速和急转弯情况,四轮转向模型则适用于复杂环境和高速行驶情况。根据实际需求,可以灵活选择适合的转向模型。
综上所述,本文介绍了一种基于动力学跟踪误差模型和LQR算法的路径跟踪控制方法,并通过MATLAB Simulink和CarSim软件进行了联合仿真。实验结果表明,该方法能够实现车辆在不同类型路径上的稳定跟踪,并具有较高的稳定性和鲁棒性。在实际应用中,可以根据具体需求选择合适的转向模型,以达到更好的路径跟踪效果。
相关的代码,程序地址如下:http://lanzoup.cn/704812271863.html
















 569
569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









