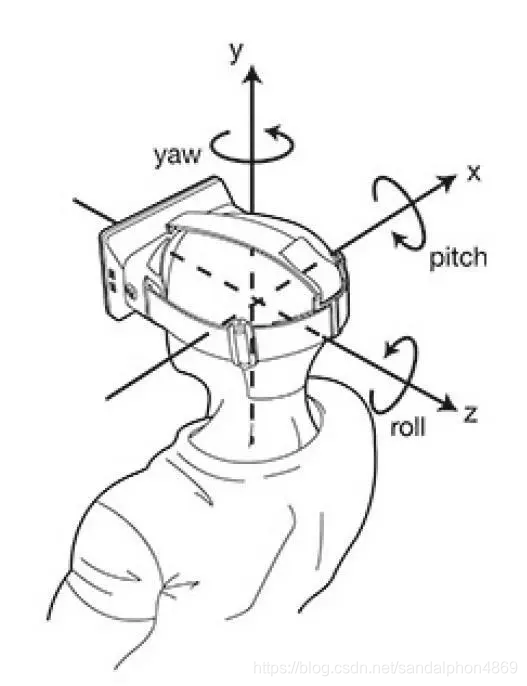
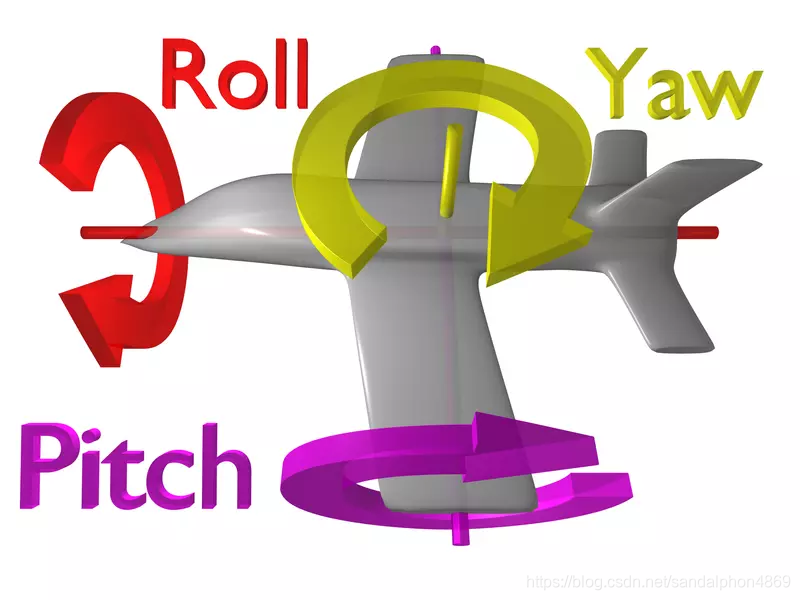
文章目录 一、含义 一、含义 roll:翻滚角 ϕ \phi ϕ(视角旋转)。向右滚为正,反之为负。pitch:俯仰角 θ \theta θ(往上往下)。抬头为正,反之为负。yaw:侧航角 ψ \psi ψ(往左往右)。右偏航为正,反之为负。

 7381
7302
7381
7302

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 本文深入解析了三维空间姿态的三个关键角度:roll(翻滚角),pitch(俯仰角),和yaw(侧航角)。详细解释了每个角度的定义及其在坐标系中的作用方向,为理解飞行器、机器人等设备的姿态控制提供了基础知识。
本文深入解析了三维空间姿态的三个关键角度:roll(翻滚角),pitch(俯仰角),和yaw(侧航角)。详细解释了每个角度的定义及其在坐标系中的作用方向,为理解飞行器、机器人等设备的姿态控制提供了基础知识。