







资源汇总
常用框架
自主导航

比如移动机器人基本都会具备的自主导航功能,ROS2提供了完整的自主导航系统框架和各种实现好的算法,即便我们不开发任何代码,也可以在自己的机器人上,使用这套系统,快速实现自主导航的基本功能。
大家如果要进行相关的应用开发,可以参考这个链接中的内容:
自动驾驶
自动驾驶是当今最为热门的行业之一,也是一种典型的机器人应用。
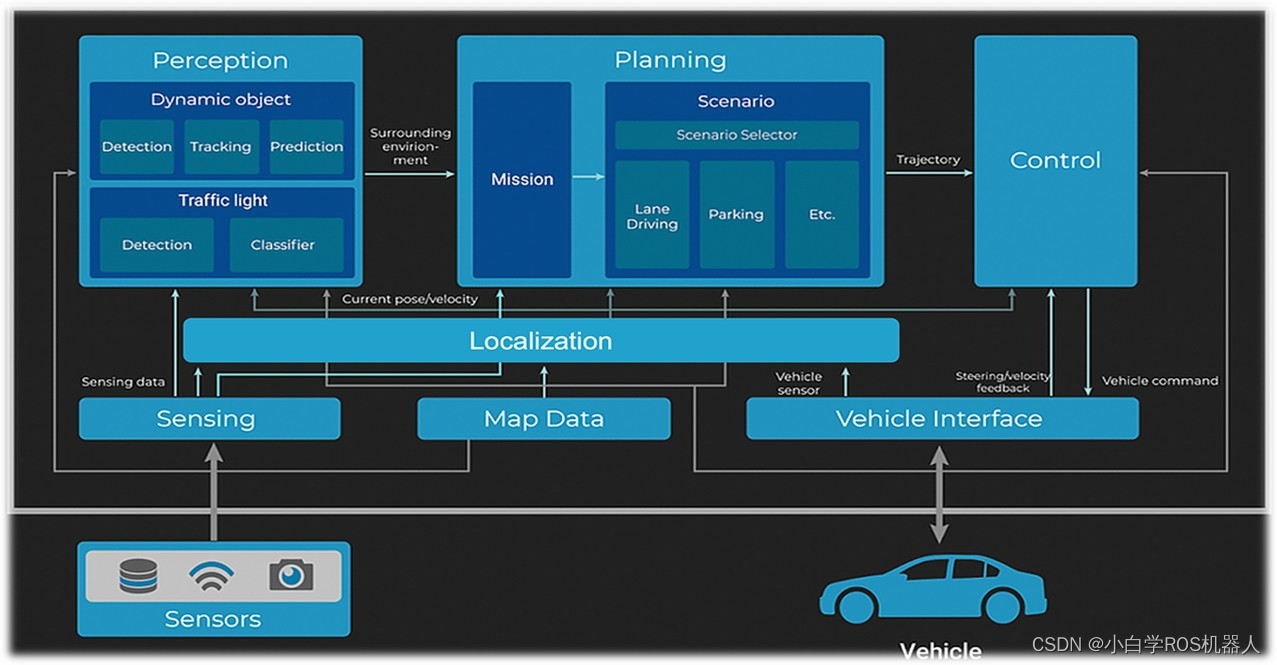
在ROS社区中,有一个著名的自动驾驶框架——Autoware,包含了自动驾驶中的感知、规划、控制等模块和实现,功能非常丰富,很多商业化的自动驾驶系统,也参考了这个框架。
大家如果对自动驾驶感兴趣,可以参考这几个链接:
https://www.autoware.org/
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1095
1095

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









