




作者 |本一
编辑 |德新
我们已经多次见证了「数字化」如何重塑行业格局:数码相机终结了胶卷时代,智能手机取代了功能手机,曾经的「奢侈品」由此迅速进入大众市场。
如今,这股变革的浪潮正汹涌地冲击着智能汽车感知系统的核心——激光雷达。
未来智能汽车的竞争,真正的分水岭不是更快的百公里加速或更豪华的内饰,而是它们究竟有多「聪明」。这种「聪明」很大程度上取决于汽车能否「看清」周围的世界。
激光雷达作为自动驾驶系统的「眼睛」,正是赋予智能汽车超越人类感官极限「视力」的关键技术。但要让这双「慧眼」从少数高端车型的专配,成为大众车型的标配,「数字化」是一道必须迈过去的坎。
一、数字化的必然性
传统的模拟激光雷达使用雪崩光电二极管(APD)或PIN光电二极管或SiPM硅光电倍增管作为探测器,将接收到的光信号转换成模拟电流或电压信号。这些微弱的模拟信号需要经过一系列模拟电路进行放大、滤波等处理,然后才通过模数转换器(ADC)转换成数字信号,以便后续处理。
从特征上看,模拟激光雷达通常采用机械旋转的方式进行扫描,这也是早期激光雷达体积较大、成本较高、可靠性相对较低的原因之一。模拟信号传输和处理过程中容易引入噪声干扰,降低测量精度,同时复杂的模拟电路链路也限制了系统集成度和小型化程度,也就是说模拟架构的激光雷达无法在小尺寸产品中实现高线数,性能上限低。
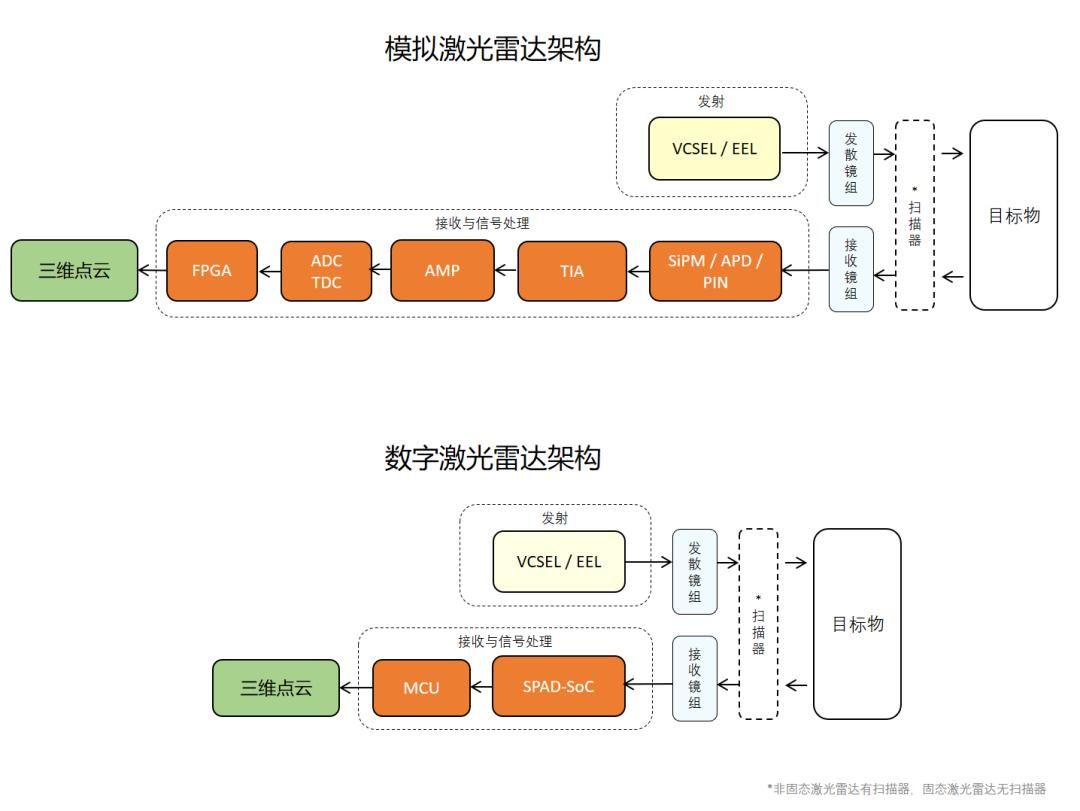 ▲传统模拟激光雷达架构与数字激光雷达架构对比
▲传统模拟激光雷达架构与数字激光雷达架构对比
激光雷达数字化就是接收端去掉了「模拟信号转数字信号」的过程,接收光后直接生成数字信号,然后传输数字、处理数字信号,输出点云。 这种从源头数字化的方式,大大简化了信号处理链路,提高了系统的抗干扰能力和信号完整性。
数字激光雷达的核心在于它的光电探测和信号处理方式发生了根本性变革,力求在信号产生的最前端就实现数字化。它采用了单光子雪崩二极管(SPAD)或类似的数字阵列探测器,当单个或极少数光子到达时,它会产生一个雪崩效应,直接输出一个数字脉冲信号。
由于探测器直接输出数字信号,后续的信号处理可以更多地在数字域进行。通常SPAD阵列会与时间数字转换器(TDC)等电路集成在同一块芯片上,直接计算光子飞行时间,输出数字化的距离信息。
这种架构不仅大大简化了后续的模拟信号处理链路,还提高了集成度。通过半导体工艺(如CMOS),可以将大量的SPAD单元、TDC以及其他数字逻辑电路集成到一颗或少数几颗芯片上,大幅降低尺寸、功耗和成本,并且易于大规模量产。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









