







前端
- 前端负责提取双目数据的FAST特征点并跟踪,同时还会接收IMU数据,积分得到旋转,用于预测匹配点。
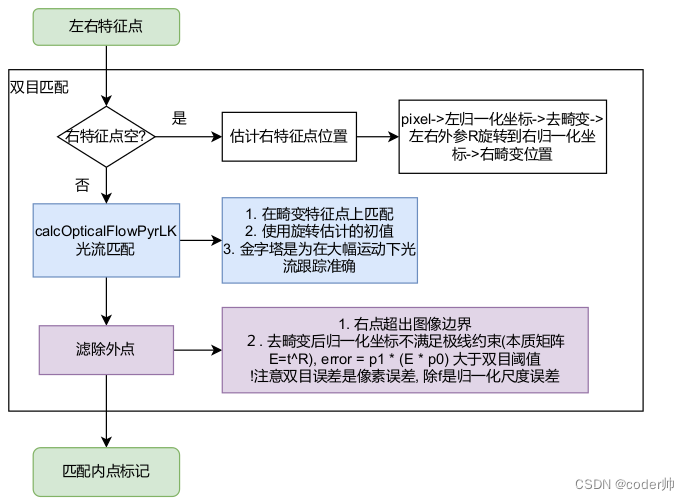
- 图像金字塔是为了在大幅运动下光流跟踪精准。只会在第一层图像上提取点。
- 双目不需要极线矫正。
- 前端不做三角化。
- TwoPointsRANSAC:
- 迭代次数通过概率计算获得,迭代满次。
- R通过IMU计算,根据对极约束和本质矩阵(E=t^R),算出t, 去除外点。
- 当仅用旋转预测得到很小的投影误差时,说明运动退化,平移t几乎是0。
- 新特征点提取不会在跟踪成功的点附近,跟踪做了多次去外点的操作,包括左目前后帧,右目前后帧和左右目之间。当没有跟踪成功的点时,前端不会做代码层面的视觉初始化,只是不向后端发送坐标。
- 每个grid内超过最大设置数删除跟踪点,按生命周期降序排列,周期长的点不会被删除。
- 前端会把追踪到的特征点的id与特征点在左右目去畸变的归一化坐标发送给后端。















 9273
9273











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









