







 本文探讨了拉普拉斯变换在控制系统分析中的作用,重点在于收敛域(ROC)、逆变换(ILT)和传递函数。介绍了稳定性的判断依据,强调通过控制系统的极点分布来确保系统输出的稳定性。分析了不同极点位置对系统稳定性的影响,指出实部为负的极点对应系统稳定,实部为正则系统发散。
本文探讨了拉普拉斯变换在控制系统分析中的作用,重点在于收敛域(ROC)、逆变换(ILT)和传递函数。介绍了稳定性的判断依据,强调通过控制系统的极点分布来确保系统输出的稳定性。分析了不同极点位置对系统稳定性的影响,指出实部为负的极点对应系统稳定,实部为正则系统发散。
拉普拉斯变换的收敛域(ROC)与逆变换(ILT)
1.是否可积即是否收敛(如果可收敛,面积/拉氏值即为收敛域)
(1)收敛的条件:e^(-jwt)积分为振荡函数

(2)常系数线性微分方程对应线性时不变系统,其分析步骤有三:
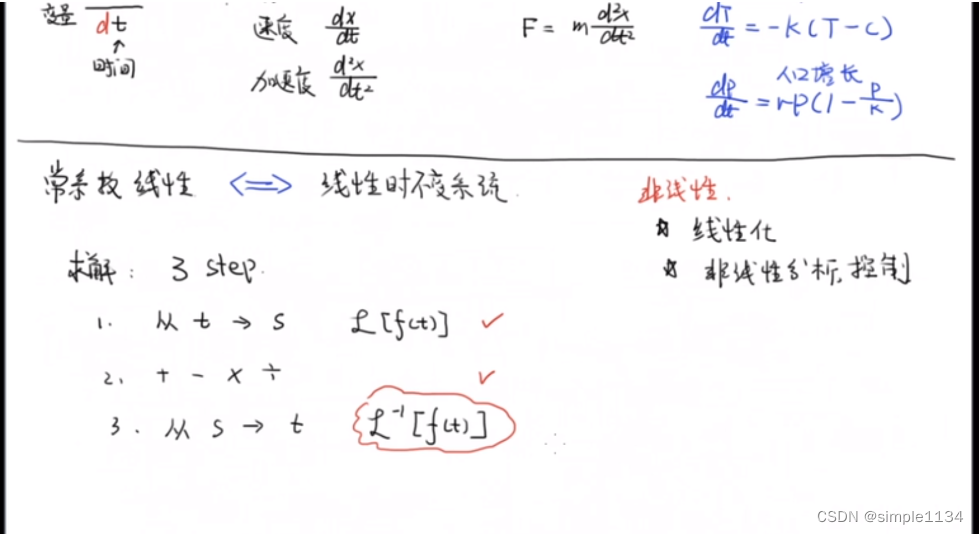
(3)拉氏逆变换(ILT)的方法:
传递函数的极点:s=-4,s=-1;
求解过程中令s=-4,s=-1解出A,B;
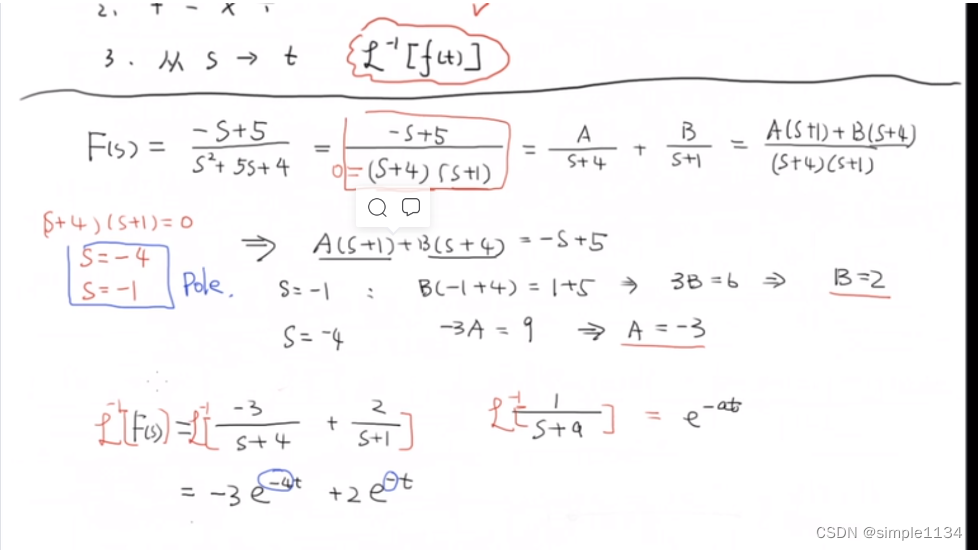
1.化简时采用欧拉公式的两个变形形式(要熟记!)进行化简,即为e^(i*狗)=cos(狗)+isin(狗);
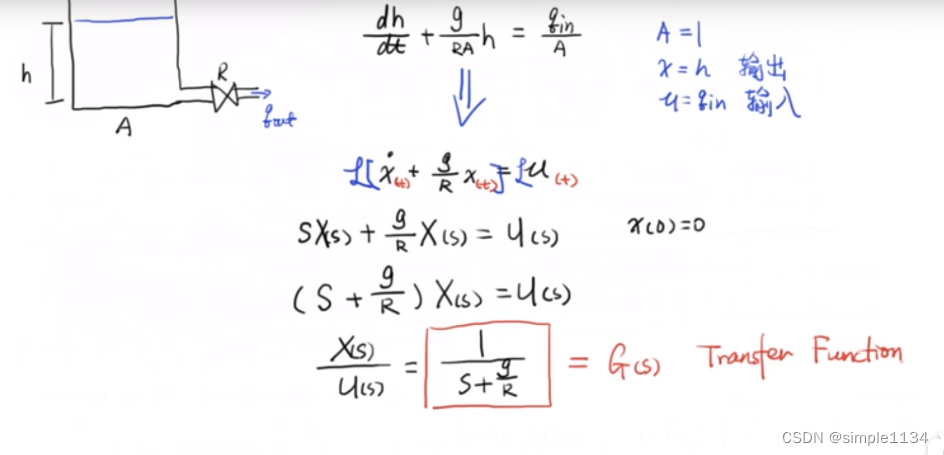
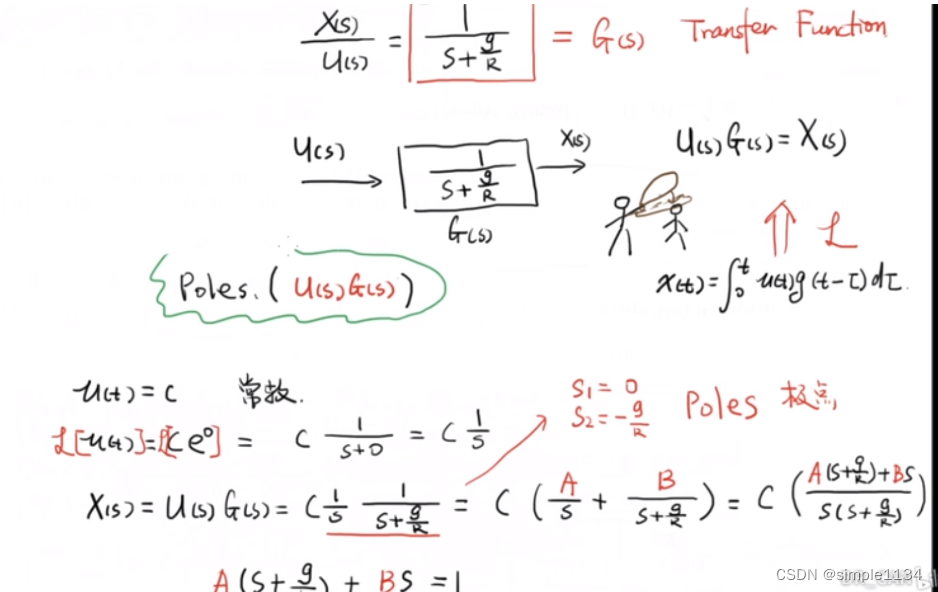
传递函数(Transfer Function)与拉普拉斯变换
1.传递函数的推导
(1)卷积可以简单的理解为叠加的状态在未消失时再次叠加
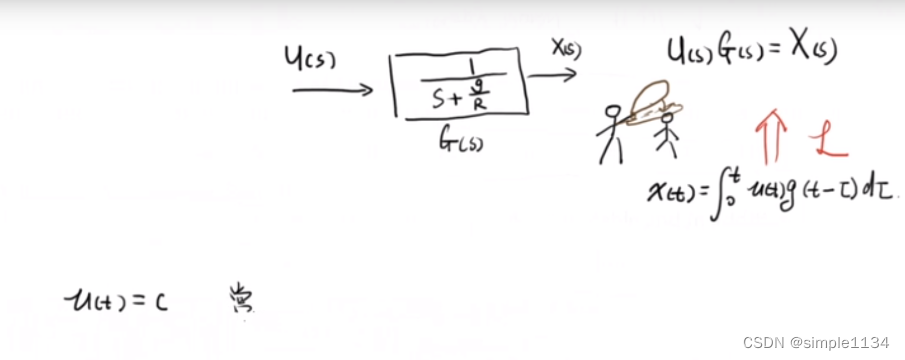
2.令u(t)=c时,u(t)=ce^(0),继续推导如下:
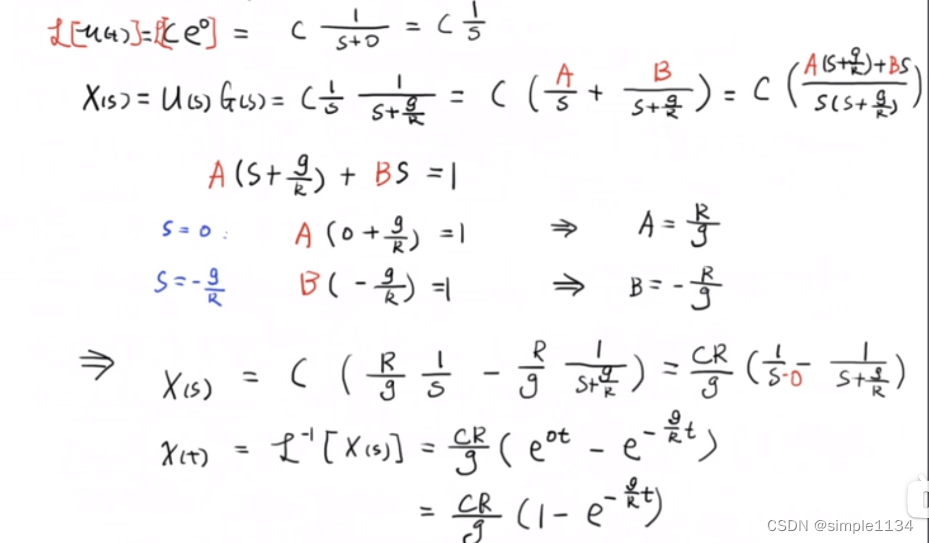
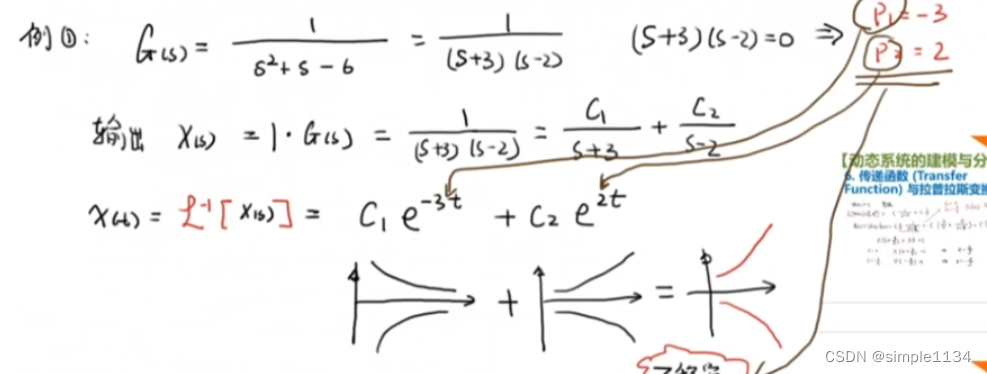
将x(t)作图可得:
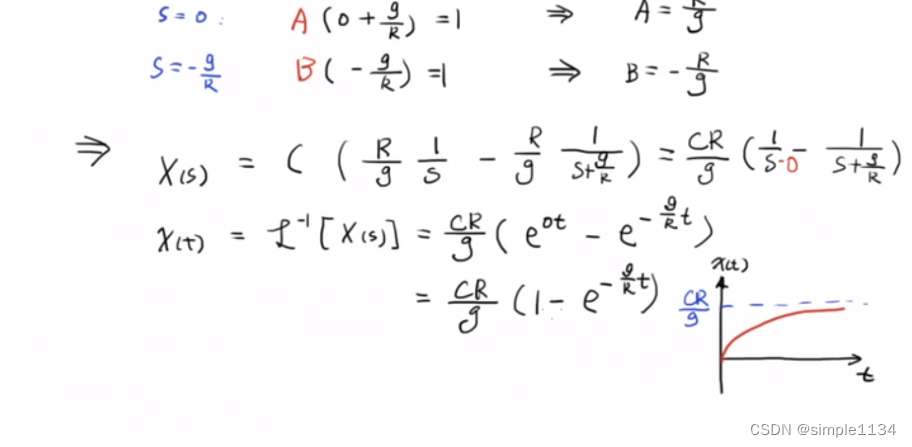 由图可知x(t)是在一个范围内衰减的,观察e的指数0,-g/R,发现令u(s)*g(s)的分母部分=0时,得到极点s1=0,s2=-g/R,因此可得重要结论:通过控制系统极点,来控制系统输出。
由图可知x(t)是在一个范围内衰减的,观察e的指数0,-g/R,发现令u(s)*g(s)的分母部分=0时,得到极点s1=0,s2=-g/R,因此可得重要结论:通过控制系统极点,来控制系统输出。
稳定性分析
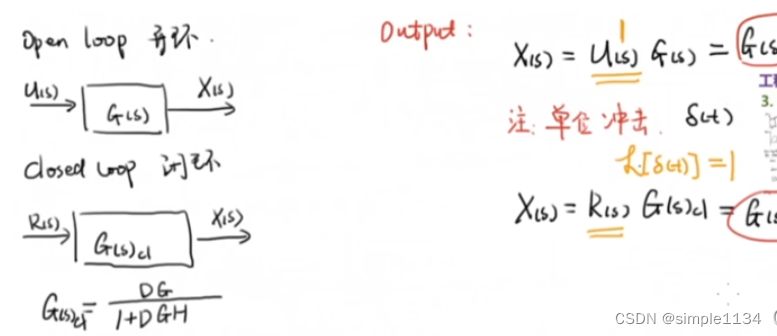
由第一节可知开环闭环系统响应如下,给系统输入单位冲击响应就可以判断系统的稳定性,单位冲击响应的拉普拉斯变换是1,所以X(s)=G(s),对系统的稳定性分析变为对系统传递函数的分析。
 传递函数分子为零的点为零点,分母为零的点为极点
传递函数分子为零的点为零点,分母为零的点为极点
 从下图可以看出来,由于极点的正负,可以影响系统的稳定性
从下图可以看出来,由于极点的正负,可以影响系统的稳定性
 共轭复根的实部是负的,其输出函数为e^(-t)sin(t+∅)。sin(t+∅)和这两个函数相乘会趋于稳定,同理,如果实部为正,会让系统发散,为零则处于临界状态
共轭复根的实部是负的,其输出函数为e^(-t)sin(t+∅)。sin(t+∅)和这两个函数相乘会趋于稳定,同理,如果实部为正,会让系统发散,为零则处于临界状态
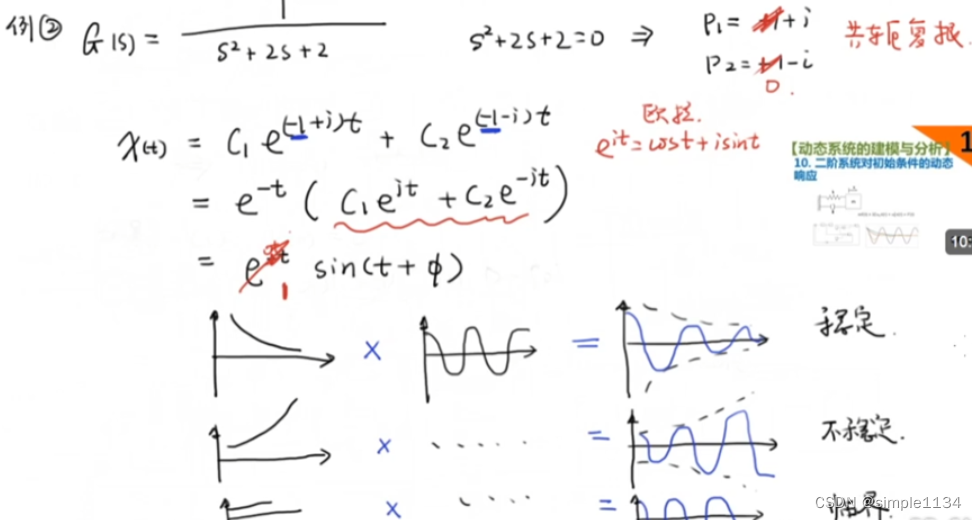
总结如下图为:如果极点为实数,落在左半平面稳定(红色),右半平面(蓝色)发散;如果为一对共轭复根,落在左半平面(棕色)一边震荡一边稳定,右半平面(绿色)一边震荡一边收敛;如果只有虚部(黄色),就是震荡的响应
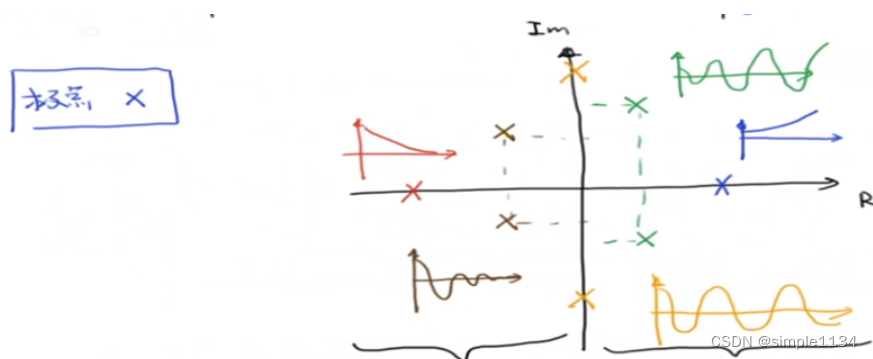 所以,在设置控制器D的时候,是需要控制器的极点再左半平面,在现代控制理论中,研究的是状态矩阵的特征值,这些特征值实际上就对应着极点
所以,在设置控制器D的时候,是需要控制器的极点再左半平面,在现代控制理论中,研究的是状态矩阵的特征值,这些特征值实际上就对应着极点

















 814
814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









