







 本文详细介绍了如何在Ubuntu系统中安装ROS,并通过catkin工具创建和配置ROS工作空间。内容包括安装ROS、管理环境变量、创建工作空间、初始化及构建工作空间的步骤,以及如何在.bashrc文件中设置ROS_PACKAGE_PATH,确保工作空间在每次启动bash时自动加载。
本文详细介绍了如何在Ubuntu系统中安装ROS,并通过catkin工具创建和配置ROS工作空间。内容包括安装ROS、管理环境变量、创建工作空间、初始化及构建工作空间的步骤,以及如何在.bashrc文件中设置ROS_PACKAGE_PATH,确保工作空间在每次启动bash时自动加载。
本文概述:
在学习ROS下对环境配置的问题
参考网站:
http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
https://www.douban.com/note/516838470/
1、首先要安装ROS
2、Managing Your Environment
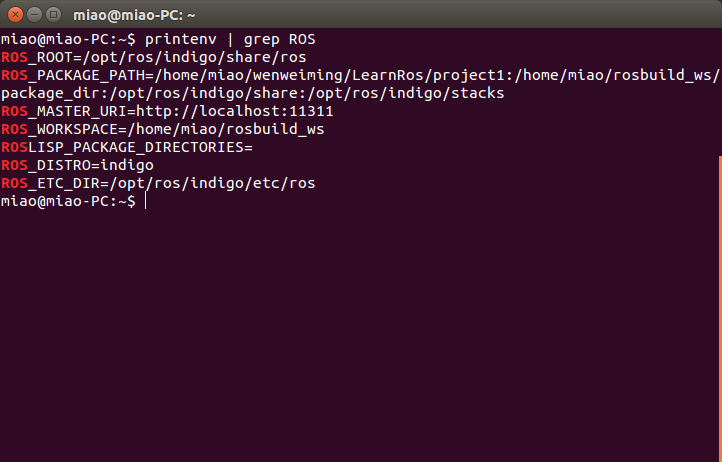
如果在使用或是在查找ROS package的时候遇到问题,要确保环境合理设置好,检查环境变量(environment variables)像ROS_TOOT和ROS_PACKAGE_PATH,用下面的方法。
$ printenv | grep ROS结果如下:
如果你是通过Ubuntu系统的apt方法安装的ROS,那么,你将会在”/opt/ros/(distro代表的是ROS的版本,如indigo、jade等。然后你可以按照下面的方法来source这些setup.*sh文件。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 792
792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









