







 本文详细介绍了如何在ROS环境中创建并运行一个简单的Hello ROS程序。首先配置工作空间,使用catkin_create_pkg创建package,接着编写hello.cpp源文件,更新CMakeList.txt,通过catkin_make编译程序。在遇到cpp文件路径和CMakeList.txt设置问题时,经过调试最终成功编译。运行程序需要在.bashrc中添加路径,并通过source命令激活,然后分别在两个终端启动ROS和运行程序。
本文详细介绍了如何在ROS环境中创建并运行一个简单的Hello ROS程序。首先配置工作空间,使用catkin_create_pkg创建package,接着编写hello.cpp源文件,更新CMakeList.txt,通过catkin_make编译程序。在遇到cpp文件路径和CMakeList.txt设置问题时,经过调试最终成功编译。运行程序需要在.bashrc中添加路径,并通过source命令激活,然后分别在两个终端启动ROS和运行程序。
这篇文章是介绍如何在ROS下写Hello的。
参考网站:
https://www.douban.com/note/519918637/
首先按照上一篇“安装和配置ROS环境 ”写的,配置好一个工作空间。
然后,在工作空间里面开发自己的package包,首先我们到工作空间的src里面,然后,在里面使用catkin_create_pkg来创建一个package包:
$ catkin_create_pkg hello std_msgs rospy roscpp结果如图:
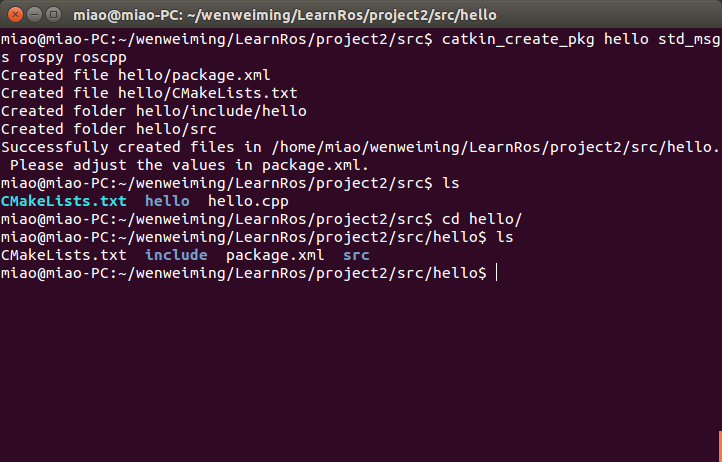
然后,在名为hello的package包下的src文件夹下编写一个hello.cpp文件:
hello.cpp文件:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1635
1635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









