







标题:ROS移动机器人项目课程内容整理
一、项目介绍
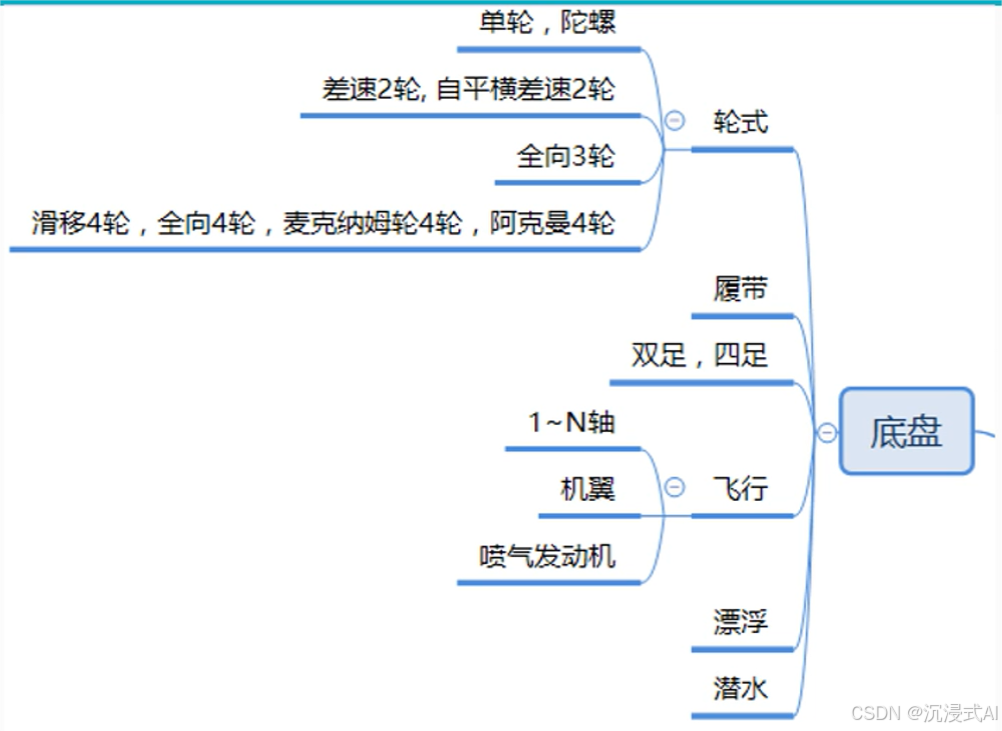
1. 底盘选型
2. 项目要求:
-
PS2 手柄控制。

-
OLED 屏显示 pid、vel、rad、rpm 等信息。

-
ROS teleop_twist_keyboard 发出 cmd_vel 话题消息可控。
-
相机视觉话题发布。
-
激光雷达 SLAM 建图(slam_gmapping)。

-
Move_base 路径规划避障。

-
Amcl 导航。
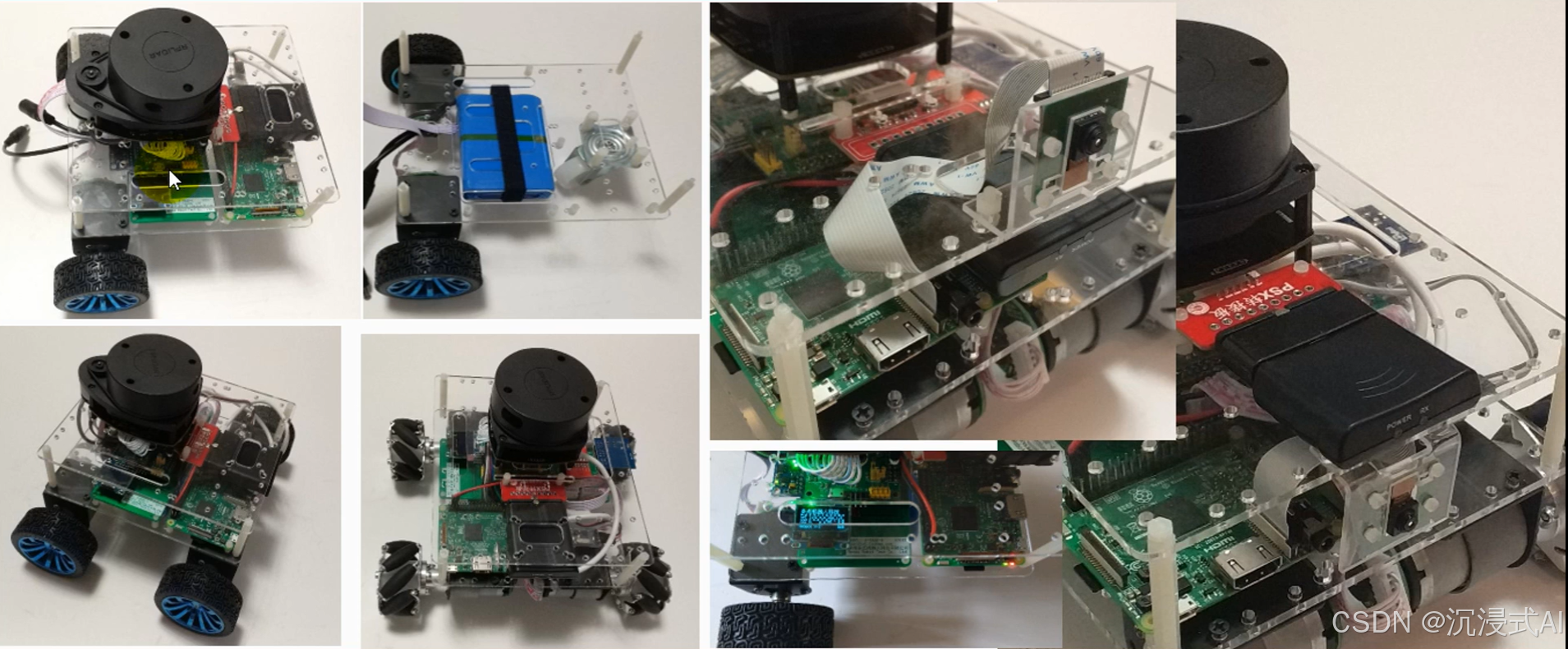
二、硬件需求
- AB相减速电机2个,68mm普通轮2个,辅助轮1个。
- PS2无线手柄,SPI转接器1个。
- 底板1个,相应的六角柱螺丝螺母等若干。
- 11.1V电池4000mAH 1个。
- STM32F107 1个,SWD仿真器1个,USB2TTL串口1个,杜邦线若干。
- 6612电机驱动芯片1个,MPU9250/6050 1个。
- I2C0.96寸OLED 1个,12转5V供电板1个。
- 树莓派3,TF卡16G Class 10,CSI摄像头,5V3A供电板,激光雷达。

三、软件需求
- STM32CubeMX创建MDK5工程,使用HAL库,为减少入门难度,先不上FreeRTOS,用TIM中断代替。
- 使用C与C++混合编译,C++开发更容易。
- 不使用rosserial协议,自己编写Serial协议上报ROS里程计信息。
- ROS开发环境为RoboWare,ROS开发使用C++。
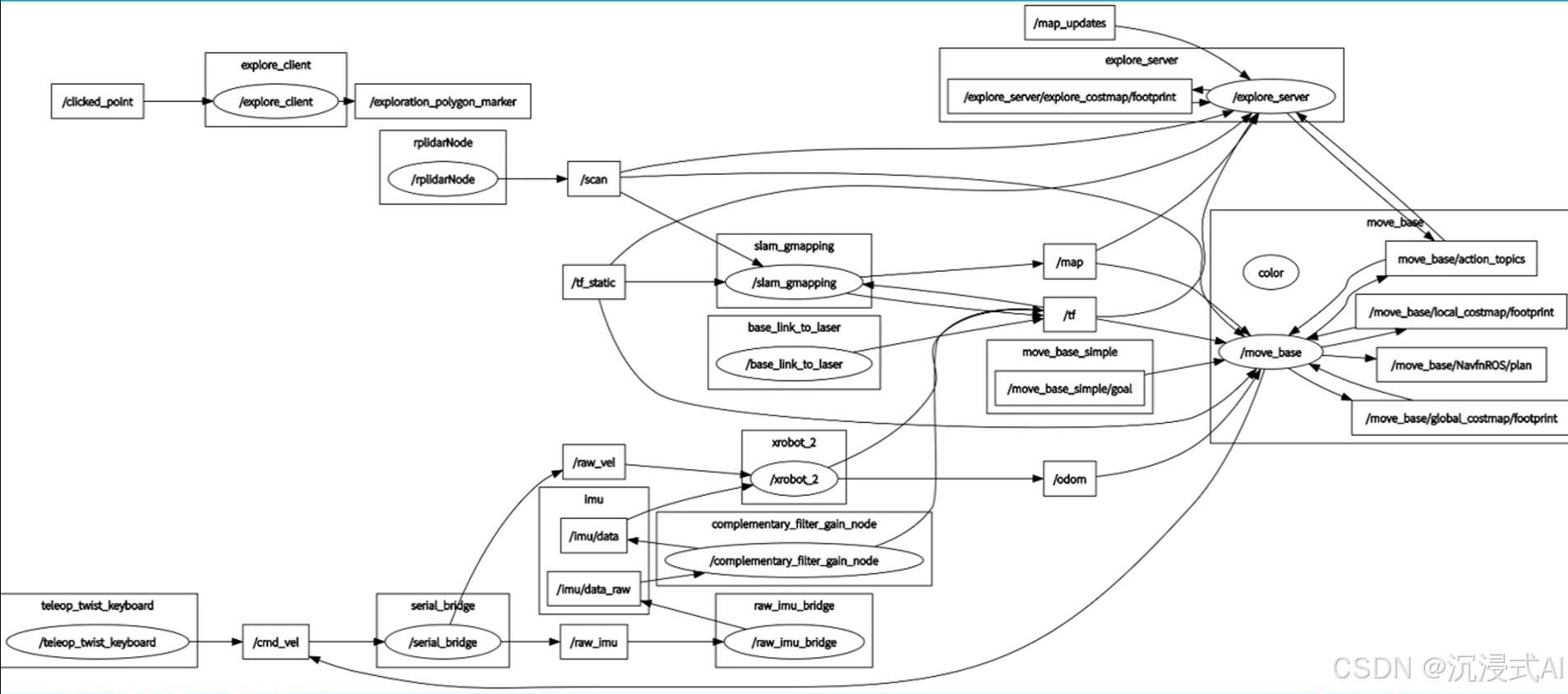
四、ROS框架
五、底盘选型相关
- 选最简单的入门,先做出成果来,再向高层次。
以上是对ROS移动机器人项目课程内容的整理,希望对大家有所帮助。

















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









