










TX2 上编译,有啥稀奇,跟普通的都差不多,但是有些基础库安装要符合TX2的特性。做SLAM研究,就是为了做工程,使用TX2直接距离实施应用更进一步。其中遇到三个难点
这里先给出一个链接https://www.ncnynl.com/archives/201706/1747.html;这个是专门的TX2开发资料教程。相信许多库的安装都可以参考他了。例如你要装G2O;pangolin;eigen3;mrpt;对了,还有OPENCV3.4加扩展库;这些东西要按照一定顺序来;给出结果吧,原因就不说了。1.OPENCV3.4+contrib3.4;2.eigen3;3.pangolin;4.G2O;5.mrpt1.5;至于其他的BOOST,YAML都是一句话的命令没啥好说的。好说的是有些库安装的时候会出错;
A,例如:PL-StVO编译的时候,sceneRepresentation.cpp中有一个函数,这个函数是场景更新函数,名字是:
“bool sceneRepresentation::updateScene(list<pointFeature*>matched_pt,list<LineFeature*>matched_ls)”
这个函数中有一句代码总是通不过,就是post_gt=TPost3D(1,2,3,4,5);提示说mrpt函数中不支持这个operate。这个真让人头大,编译库就怕代码中有个函数说不支持,到底是库版本错了还是代码错了,真让人抓狂,特别对于初次研究编译的人没有经验,是一个非常大的打击。这样的时候,不要急着抓狂,先分析一下编译不同的的句子特征,看看再源代码中有多少通不过的,如果就是一两句,那说明库版本没啥大问题。结果一搜索,看到一个post_gt=CPose3D(TPost3D(1,2,3,4,5));这就代码就没事,可以通过!难道是作者笔误?!谁又知道,谁让我们是第一次呢,改过来,编译就通过了,如果以后逻辑不会错,那就说明作者在给我们开玩笑!
B,跟这个类似的还有一个地方,那就是大名鼎鼎的G2O,那个高博14讲里的问题,g2o::BlockSolverTraits<6,3>函数用法问题。总不能为了这几句代码就去重新装G2O吧,所以就按照网上通用的解决方法修改作者的代码吧。改完几个waring通过。
C ,还有一个提示缺少什么库文件,例如g2o_ext_csparse,我找遍G2O的库目录确实没这个文件,于是就去CMamekList文件直接把这个库文件去掉了。至于有的什么库目录找不到啦的问题,就直接修改CMaekList文件就好了,怎么改?搜搜百度。
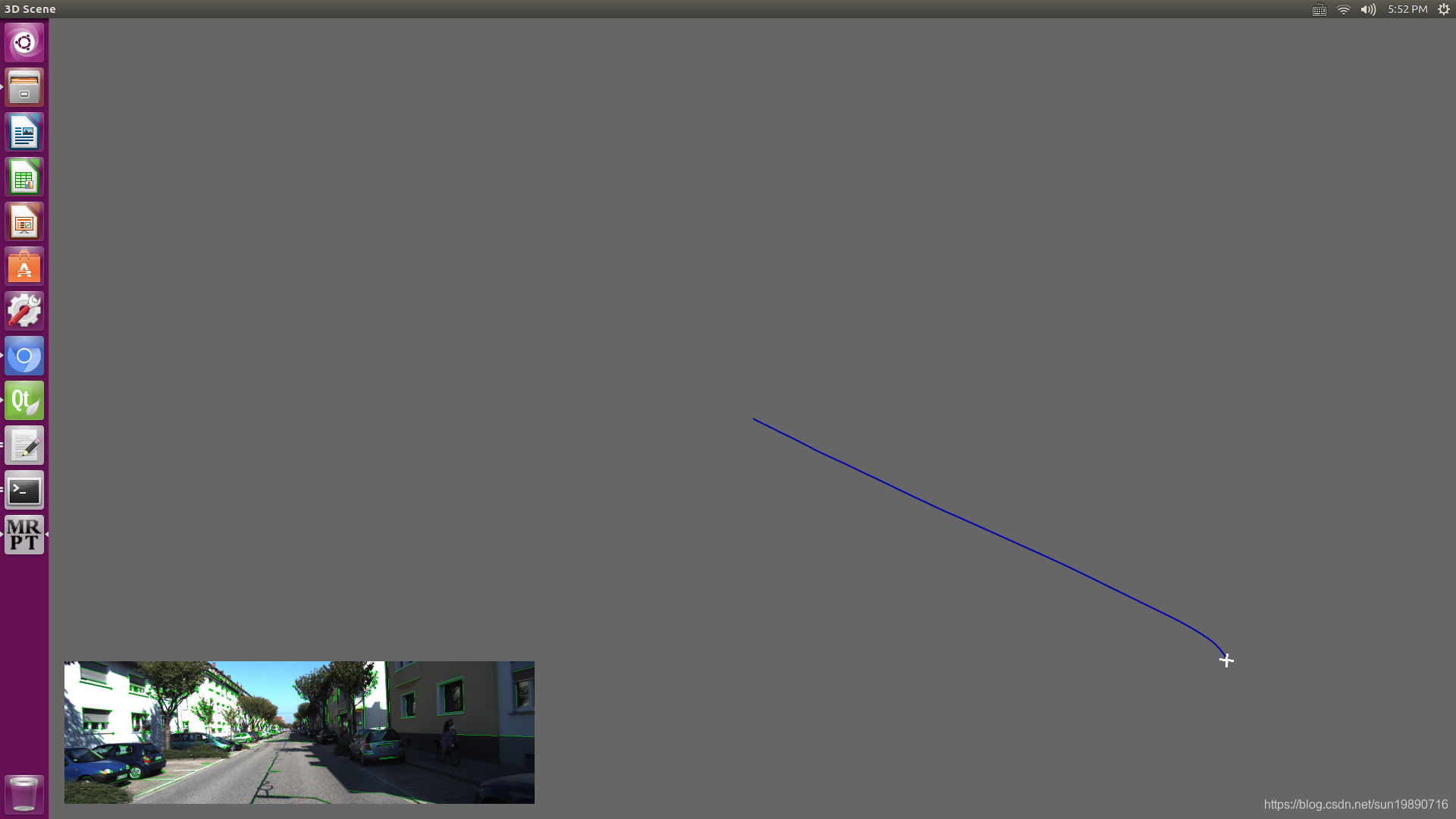
最终这个PL-SLAM在TX2上编译通过了,具体测试效果: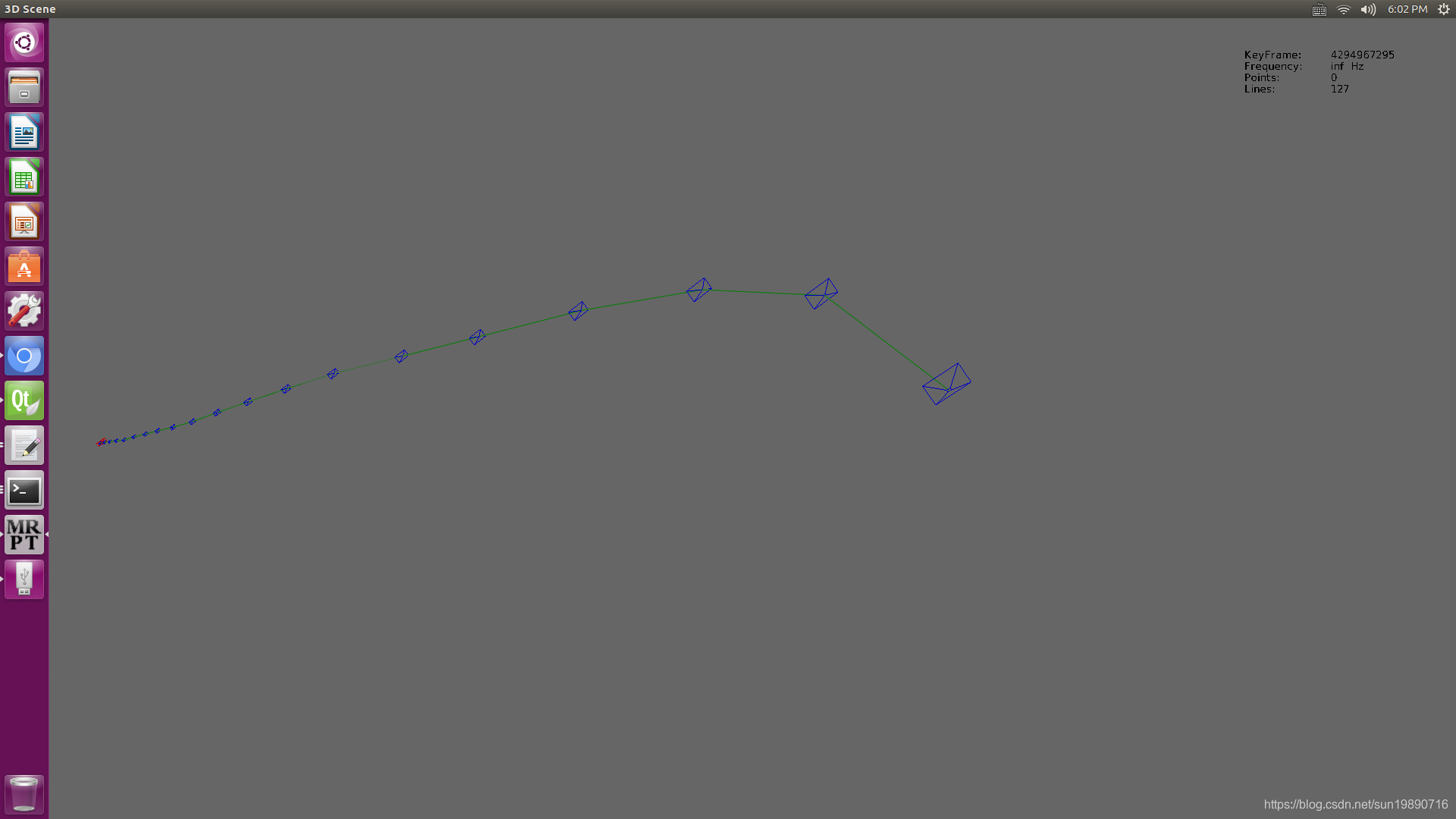














 785
785











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









