







今天第一次写博客,把一天学习的内容做个总结。
三维空间的刚体运动描述方式:旋转矩阵,变换矩阵,四元数及欧拉角。
1:旋转矩阵
理解内积和外积的关系


坐标系间的欧式变换描述:相机运动是一个刚体运动,它保证了同一个向量在各个坐标系下的长度和夹角都不会发生变化,这种变换称为欧式变换。
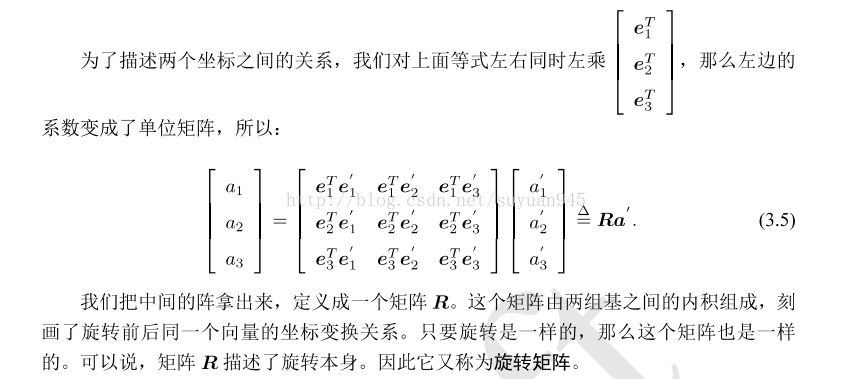
两个坐标之间的关系描述:
2:变换矩阵

变换矩阵的结构:左上角为旋转矩阵,右侧为平移向量,左下角为0向量,右下角为1.这种矩阵又称为特殊欧式群。
3:旋转向量和欧拉角
任意旋转都可以用一个旋转轴和一个旋转角来刻画,可以使用一个方向与旋转轴一致,而长度等于旋转角的向量描述,我们称这个向量为旋转向量。

欧拉角使用了三个分离的转角,把一次旋转分解称3次绕不同轴的旋转:
1:绕物体的Z轴旋转,得到偏航角yaw;
2:绕旋转之后的Y轴旋转,得到俯仰角pitch;
3:绕旋转之后的X轴旋转,得到滚转角roll;
记:rpy角的旋转顺序是ZYX,欧拉角会有万向锁问题,丢失一个维度,又被称为奇异性。
4:四元数
为解决奇异性问题,引入四元数,是一种扩散的复数,既是紧凑的,也没有奇异性。缺点是不够直观,运算稍复杂。一个四元式q拥有一个实部,三个虚部。

四元数常见的运算:四则运算、数乘、求逆、共轭等。
其中四元数到旋转矩阵的转换为:
总结:四元数,旋转矩阵,轴角,都可以用来描述同一个旋转。
第一次写比较乱,未完待续!














 417
417











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









