







线阵摄像机的摄像机模型
线阵摄像机的摄像机模型比较复杂,难在哪呢?
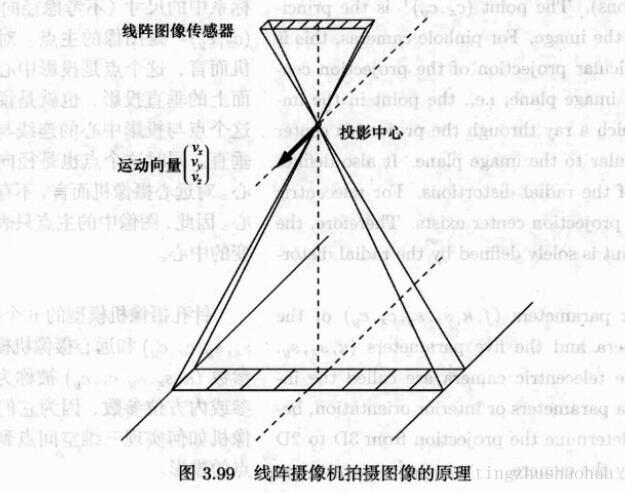
线阵摄像机必须与被拍摄物体之间有相对移动才能拍摄得到一幅有用的图像。摄像机与目标物之间的相对运动是摄像机内参的一部分。到目前为止,最常见的运动是摄像机线性运动,也就是说摄像机相对于目标物沿一条直线匀速运动,摄像机相对于目标物的方向固定,并且采集所有图像时摄像机运动状态相同。
与面阵摄像机相似,世界坐标系中某个给定点投影到图像坐标系中分为两个步骤:先将该点从世界坐标系中转化到摄像机坐标系中,再投影到图像坐标系中。

为了得到线阵摄像机内部几何模型,我们可以将线阵图像传感器看做是面阵图像传感器的某一行。这样就可以如面阵摄像机一样,建立一个成像平面坐标系,这个坐标系在投影中心后端
f
(主距)处。同样,为了简化此后的计算,可以假设这个成像平面在投影中心前端。
详述:
首先假设点
与面阵摄像机相似,最后点
(u¯,v¯)T
被转换到图像坐标系,得到坐标为
(r,c)T
。
但是通常线阵图像传感器并不是正好在投影中心后端,为了在模型中考虑这个因素,我们同样使用主点
(cx,cy)
表示线阵图像传感器相对于投影中心的平移量,也就是表示了主点和线阵图像传感器之间的相对位置关系。由于
(u¯,v¯)T
坐标的单位是米制单位,我们需要引入两个缩放比例因子
sx
和
sy
,他们确定了如何从成像平面坐标系中单位转换到图像平面坐标系中的单位(像素)。与面阵摄像机相似,
sx
表示图像传感器水平方向上相邻两像素之间的距离。
sy
的值不能够被标定并且只能被设置为线阵图像传感器单个像素在垂直方向上的尺寸。
为了确定摄像机坐标系中的点
Pc=(xc,yc,zc)T
的投影,我们首先考虑如下这种较理想的情况,不存在径向畸变(
k=0
),线阵图像传感器安装在投影中心正后方(
cy=0
),并且摄像机运动方向完全与摄像机坐标系
y
轴方向一致
那么运动向量不是完全沿
y
轴方向(
虽然线阵摄像机几何模型在与原理上只是一个透视镜头和一个远心镜头的组合,但正好这种组合导致线阵摄像机几何模型比面阵摄像机几何模型要复杂的多!恩,这个我认同。

难就难在摄像机运动与图像采集频率不符合;摄像机运动方向问题:包括与


















 4092
4092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











