







标题:LSD-SLAM:基于直接法的大范围单目即时定位和地图构建方法
类似于特征点法中的ORB-SLAM,单目直接法的是LSD-SLAM.
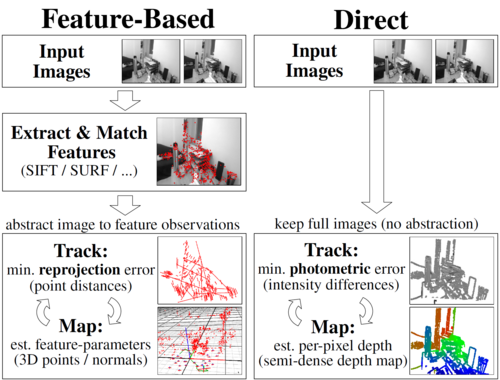
核心贡献是:将直接法应用到了半稠密的单目SLAM中,不需要计算特征点,还能构建半稠密的地图(梯度明显的像素位置)
缺点是:对相机内参和曝光非常敏感,且相机快速运动时容易丢失;回环检测部分,仍然使用特征点法,不能摆脱特征点。
摘要:
本文提出一种基于直接法的单目SLAM算法,和现有直接法相比,能够创建大尺度,全局一致性的环境地图。
除了基于直接匹配图像得出的高精度位姿估计,还能够将3D地图环境实时重构为关键帧位姿图和对应的半稠密的深度图。通过大量像素点对之间的基线立体匹配结果滤波后得到,
提出计算尺度飘移的公式,即时在大范围移动的挑战场景下也能实现。
引言:
单目SLAM相机挑战:
1、尺度不确定性,场景的尺度随着时间漂移。但是可以对不同规模大小环境空间切换
2、深度或立体视觉相机提供的深度信息是有限的,所以不如单目相机尺度灵活性好
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 8612
8612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









