







 本文介绍了SLAM(同时定位与建图)的基本概念,包括视觉SLAM的主要方法,如LSD-SLAM和ORB-SLAM,并详细阐述了SLAM的框架,包括视觉里程计、后端优化和闭环检测。作者分享了个人对SLAM的研究经历和心得,并提供了相关资源链接。
本文介绍了SLAM(同时定位与建图)的基本概念,包括视觉SLAM的主要方法,如LSD-SLAM和ORB-SLAM,并详细阐述了SLAM的框架,包括视觉里程计、后端优化和闭环检测。作者分享了个人对SLAM的研究经历和心得,并提供了相关资源链接。
SLAM的一点认识
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
一、我与SLAM不得不说的二三事
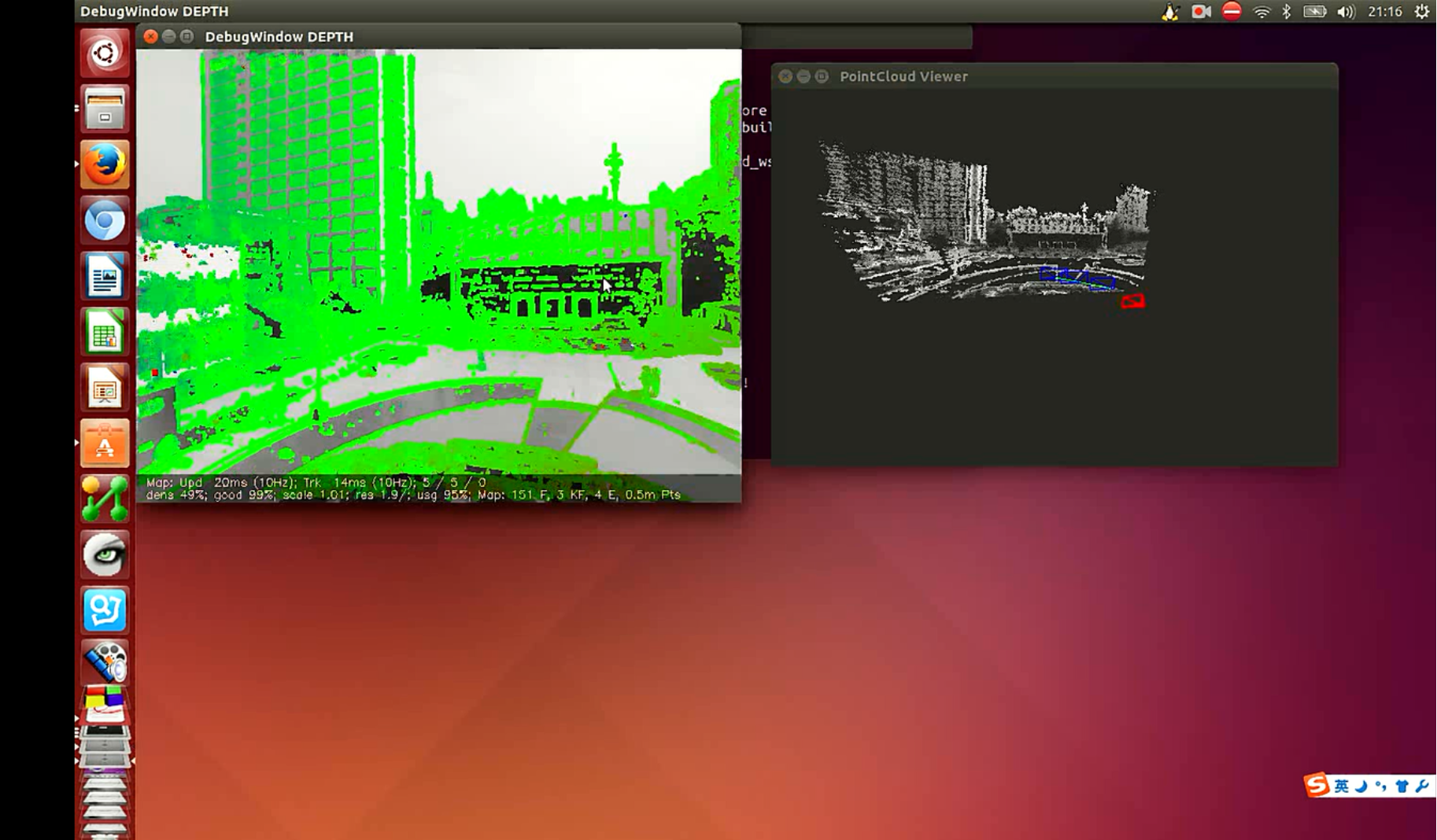
早在一年多前就接触了一点SLAM,当时研究的是LSD-SLAM,一个半稠密的SLAM系统,也是当时可以说是最好的SLAM系统。当时看着算法建出的美丽的点云图、准确的摄像机定位、以及作者在youtube上放出的大场景建图视频和基于LSD-SLAM做的手机端AR应用视频,真的是被LSD-SLAM酷炫的效果所吸引。然后自己凭借着蹩脚的视觉几何基础啃着论文,在ROS上搭着环境,也测试了自己采集的数据,还把运行离线数据的部分从ROS里抽离出来移植到了Windows平台上。当时用无人机拍了一组数据如下图所示:
那会儿确确实实学习到了很多技能,但对SLAM的理解还是不是那么透彻。后来因为被叫去做其他项目,就没有再接着往下研究了。下面附一下LSD-SLAM的相关网址,感兴趣的朋友可以去关注一下。
LSD-SLAM的主页:http://vision.in.tum.de/research/vslam/lsdslam
Github网址:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1747
1747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









