




 本文详细介绍了ORB-SLAM2的局部建图过程,包括关键帧插入、地图点剔除、新地图点创建、局部集束调整和局部关键帧剔除。在局部建图中,系统通过关键帧插入更新Covisibility Graph,并进行地图点的维护与优化,确保SLAM系统的稳定性和准确性。
本文详细介绍了ORB-SLAM2的局部建图过程,包括关键帧插入、地图点剔除、新地图点创建、局部集束调整和局部关键帧剔除。在局部建图中,系统通过关键帧插入更新Covisibility Graph,并进行地图点的维护与优化,确保SLAM系统的稳定性和准确性。
ORB-SLAM2详解(五)局部建图
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
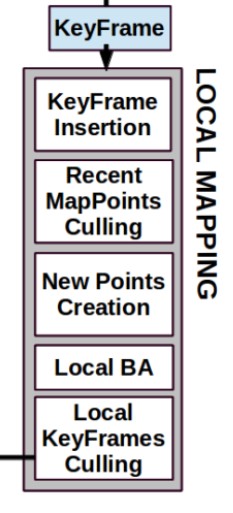
在之前的Tracking中,我们得到了新的关键帧Ki。如下图所示,Local Mapping这部分 包括插入关键帧,剔除冗余的地图点和关键帧,还有进行局部集束调整。接下来按照顺序介绍各部分。
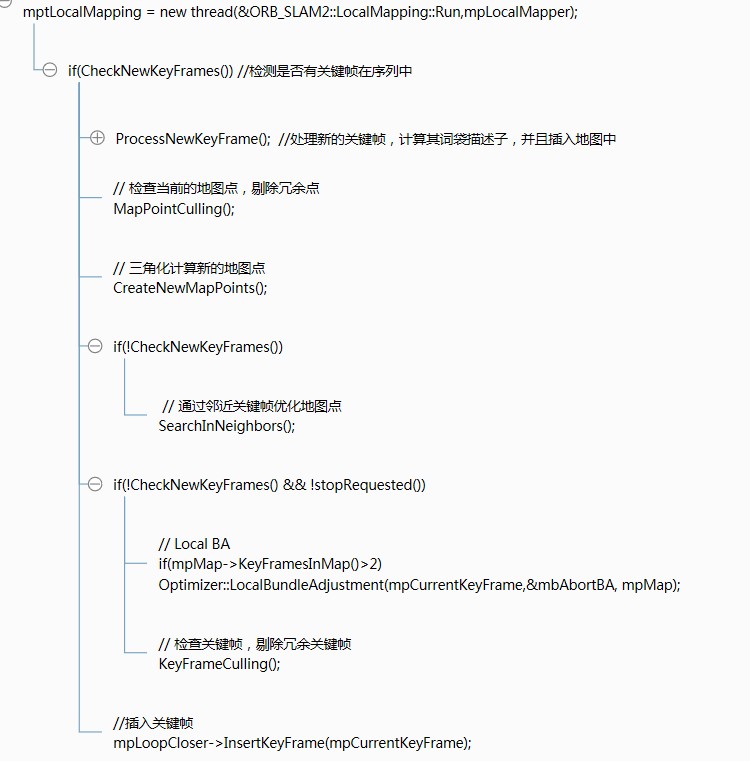
这一部分通过之前实例化SLAM系统对象时,实例化了一个LocalMapping的对象,并且开启一个线程,运行LocalMapping::Run()函数。整个代码逻辑如下:
一、关键帧插入
首先将新的关键帧Ki作为新的节点Ki加入Covibility Graph,并且更新与那些能够共享地图点的关键帧节点相连接的边。同时更新关键帧Ki的生长树,并计算表示关键帧的词袋BOW。这一部分的接口是在LocalMapping.cc中的
// BoW conversion and insertion  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 9943
9943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









