






消元简化了线性方程组 Ax=b ,幸运的是它也简化了理论。存在性和唯一性的基本问题(一个解或没有解或无穷多个解)在消去之后很容易回答,我们现在就针对 m×n 系统讨论这些问题。
但消去只有得到了一种 Ax=b 的一种理解,我们的主要目标是实现不同和更深层次的理解,之后的内容比之前的难一点,它将通向线性代数的核心。
为了给出向量空间的概念,我们首先介绍一下最重要的空间,他们用
R1,R2,R3,…
表示;
Rn
空间由
n
个列向量组成。(我们用
线性代数有价值的就是到
n
维空间的扩展非常直接,对于
我们可以将任意两个向量相加,我们可以用标量和向量相乘。换句话说,我们可以进行线性组合。
加法满足交换律 x+y=y+x ;有零向量满足 0+x=x ;有负向量 −x 满足 −x+x=0 。八条性质(包括这三条)是基本要求;(这里没有列出其余五条,大家可以上网查找或给博主留言)实向量空间就是满足向量加法和实数乘法的向量集合,加法和乘法得到的向量肯定还在空间内,并且还得满足八个条件。
一般情况我们讨论的向量都是属于空间 Rn 的;他们是普通的列向量。如果 x=(1,0,0,3) ,那么 2x(x+x) 的元素就是2,0,0,6。下面我们给出是三个例子:
- 无限维空间 R∞ ,它的向量有无限多个元素,就像 x=(1,2,1,2,…) , x+y,cx 法则依然成立。
- 3×2 矩阵的空间,这种情况下向量就是矩阵!我们能够将两个矩阵相加并且 A+B=B+A ,存在零矩阵等等,这个空间几乎和 R6 一样。(六个元素组织在矩阵里而不是一列)对于任何 m,n ,类似的将得到 m×n 矩阵的向量空间。
- 函数
f(x)
空间,对于任何定义在闭区间上例如
0≤x≤1
的函数
f
,都属于该空间。像
f(x)=x2,g(x)=sinx,(f+g)(x)=x2+sinx,3x2,−sinx 等等,这些向量是函数,它的维数比 R∞ 还要大
我们想描述向量空间并解释为什么他们如此重要。几何上,考虑常见的三维 R3 并任意选择一个通过原点的平面,那个平面是一个向量空间,如果我们用3 或-3或任何一个数乘以平面里的一个向量,得到的向量依然在这个平面内。如果我们将平面内的两个向量相加,他们的和依然在平面内,平面通过 (0,0,0) 说明了线性代数最基本想法中的一个;它是原空间 R3 的子空间。
定义:向量空间的子空间是非空子集,它满足线性空间的要求:线性组合。
- 如果将子空间里的任意向量 x,y 相加, x+y 在子空间内。
- 如果将子空间里的任意向量
x
和任意标量
c 相乘, cx 在子空间内。
注意我们强调空间这个词,子空间是一个子集,它对加法和标量乘法封闭。这些操作跟随主空间的规则,在子空间内部依然保持,八条性质更大的空间都是满足的,因此在每个子空间里自动满足。特别需要注意的是零向量属于每一个子空间,因为根据第二条性质:我们选择标量 c=0 。
最小的子空间
Z
只包含一个向量,那就是零向量,它是零维空间只包含原点,对规则1,2都满足,因为
子空间和子集合是有区别的,在没有空间的前提下能够进行向量加法和标量乘法吗?
例1:考虑 R2 中的所有元素为非负的向量,这个子集合是 x−y 平面的第一象限;坐标满足 x≥0,y≥0 。但它不是一个子空间,虽然它包含零并且向量加法都在空间内,但是法则2不满足,因为如果标量-1乘以向量 [1,1] 的话,结果为 [−1,−1] ,它在第三象限而不是第一象限。
如果我们包含一三象限,那么标量乘法也满足。然而,法则1 将不满足,因为 [1,2]+[−2,−1]=[−1,1] 不在这两个象限内。包含第一象限最小的子空间是整个 R2 空间。
例2:从 3×3 矩阵空间开始,一个可能的子空间是下三角矩阵的集合,另一个是对称矩阵的集合,如果 A,B 是下三角矩阵,那么 A+B,cA 是下三角矩阵,如果 A,B 是对称矩阵,那么 A+B,cA 是对称矩阵。当然,子矩阵都在这两个子空间里。
矩阵的列空间
现在我们看一个比较关键的例子,矩阵
A
的列空间和零空间。列空间包含矩阵
当 m>n 时我们的方程个数比未知量要多(通常情况下这没有解),这个系统只对一小部分 b 有解。
1、对于
这段描述只是从列的角度重述了
注意问题是:找出
u,v
使得他们乘以第一和第二列得到
b
,当这样的系数存在时该系统才有解,向量
我们有效的
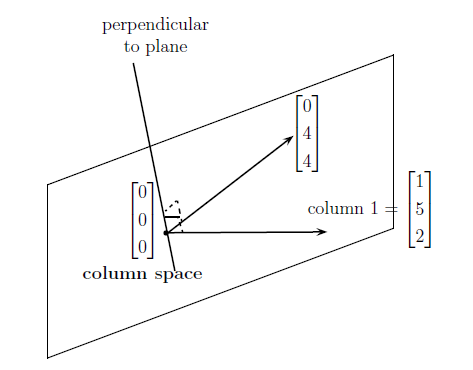
我们可以从几何上描述列的所有线性组合:对于
Ax=b
,当且仅当
b
位于两个列向量确定的平面上(图1)时它是有解的。如果
重要的是,这个平面不仅仅是 R3 的子集合,它还是一个子空间。我们用 C(A) 表示, Rm 的子空间很容易检查是否满足规则1和2:
- 列假设 b,b′ 位于列空间上,也就是存在 x,x′ 使得 Ax=b,Ax′=b′ ,那么 A(x+x′)=b+b′ ,所以 b+b′ 也是列的线性组合,所以列空间对加法是封闭的。
- 如果
b
在列空间
C(A) 里,那么 cb 也在里面。如果某个列的组合( Ax=b )得到 b ,那么组合乘以c 将得到 cb ,也就是说 A(cx)=cb 。
图1
对于另一个矩阵 A ,图1中的维数可能不同,最小的列空间是A=0 ,唯一的列组合是 b=0 。另一个极端的例子是,假设 A 是5×5 单位矩阵,那么 C(I) 就是整个 R5 空间; I 的五个列空间可以组合出任何五维向量b ,这不是单位矩阵特有的,任何 5×5 的非奇异矩阵它的列空间都是整个 R5 空间,对于这样的矩阵我们可以用高斯消元法求解 Ax=b ;有五个主元,因此对每个非奇异矩阵, b 都位于C(A) 中。
对于奇异矩阵和任何形状的长方形矩阵, C(A) 是位于零空间和 Rm 空间之间的,结合它的垂直空间我们能够更好的理解 Ax=b 。
零空间
Ax=b
的第二个方法与第一个是对偶的,我们现在不仅关注右边的
b
,也关注一下得到的解
矩阵的零空间由所有
规则1满足:如果
Ax=0,Ax′=0
,那么
A(x+x′)=0
。规则2也满足:如果
Ax=0
,那么
A(cx)=0
。如果右边非零的话,规则就都不满足!只有齐次方程的解形成了子空间。上面的例子很容易求出零空间;它尽可能的小:
第一个方程给出 u=0 ,第二个给出 v=0 ,零空间只包含向量 (0,0) ,这个矩阵列是相互独立的——这个概念不久就给出。
当第三列是前两列的组合式,情况就发生了变化:
B
和
B
的零空间是所有点
向量
b
在列空间里,向量

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









