






我们已经知道了矩阵
A
的四个基本空间,它的零空间使得向量变成零向量,因为
假设
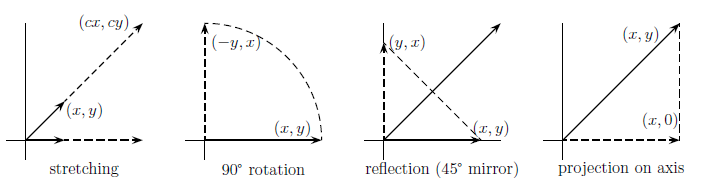
图1:四种矩阵的变换
1、 A=[c00c] ,它是单位矩阵乘以常数得到的, A=cI ,将每个向量拉伸 c 倍,整个空间被拉长或收缩。
2、
3、 A=[011c] ,反射矩阵,它将每个向量做关于某个镜面的反射,图中的镜面是直线 y=x ,像 (2,2) 这类点不会发生变化,像 (2,−2) 这类点翻转成 (−2,2) 。像 v=(2,2)+(2,−2)=(4,0) 这类点一部分变化一部分不变, Av=(2,2)+(−2,2)=(0,4) 。
反射矩阵也是置换矩阵!在代数上它非常简单,就是将 (x,y) 变成 (y,x) ,而在几何图像上被掩盖了。
4、
A=[1000]
,投影矩阵,它将整个空间投影到低维子空间上(不可逆),图中是将平面的每个向量
(x,y)
变为水平轴上最近的点
(x,0)
。这个轴是
A
的列空间,投影为
这些例子也可以放到三维空间里,此时矩阵将是在空间中进行缩放,沿着平面旋转或反射,将一切事物投影到二维平面上。另外知道矩阵不能做什么也是很重要,某些变化
- 不可能移动原点,因为对于每个矩阵 A0=0 。
- 如果向量
x
变成
x′ ,那么 2x 肯定是 2x′ 。一般来说 cx 肯定变成 cx′ ,因为 A(cx)=c(AX) 。 - 如果向量 x,y 分别变成 x′,y′ ,那么他们的和 x+y 肯定变成 x′+y′ ,因为 A(x+y)=Ax+Ay 。
矩阵乘法进行变换的时候施加这些规则,第二个规则包含第一个( c=0 得到 A0=0 ),对于第三个规则,考虑 (4,0) 关于45 度直线的反射,它可以分成 (2,2)+(2,−2) ,而且这两部分互为反射。同样的考虑投影:先分成两部分,然后分别投影并将投影相加。这些规则应用在任何矩阵的变换上。
他们的重要性还体现在名字的:符合三条规则的变换叫做线性变换。这些规则可以总结为一个:
20、对于任意的数 c,d 和向量 x,y ,矩阵乘法满足线性规则:
任何矩阵都产生一个线性变换,那么反过来说:每一个线性变化都对应一个矩阵吗?本篇文章就是找出这个答案:是的。这是步入线性代数的基础,从性质(1) 开始引申出许多其他结论。现在我们直接从矩阵开始,看看他们如何表示线性变换。
一个变换没必要必须从
Rn
变到相同的空间
Rn
,允许将
Rn
中的向量变成不同空间
Rm
中的向量,那就是
m×n
矩阵所做的事!原始向量
x
有
更进一步,线性条件(1)的操作有加法和标量乘法,但是
我们举一个空间
Pn
上的例子,这些向量是次数为
n
的多项式
例1:微分运算
A=d/dt
是线性的:
A
的零空间是一维的常数空间:
例2:从0到
t
的积分运算也是线性的:
这次没有零空间(除了零向量外)但是积分没有得到 Pn+1 中的所有多项式,方程(3)的右边没有常数项,可以常数多项式在左零空间里。
例3:一个确定多项式像
2+3t
乘以多项式是线性的:
将 Pn 变换到 Pn+1 ,除了 p=0 外没有零空间。
在这些例子中,线性都不太难验证,有些看起来还挺有趣。是金子总会发光,这种性质有点像自生的属性,不会因为外界条件而改变。无关怎样,变换有非常重要的性质。但是许多变化都不是线性的,例如平方多项式( Ap=p2 ),或加一( Ap=p+1 ),或保持正系数( A(t−t2)=t )。只有线性变换才能得出矩阵。
矩阵表示变换
线性有个至关重要的结论:如果我们知道基中每个向量的
Ax
,那么我们就知道整个空间中每个向量的
Ax
。假设基包含
n
个向量
变换确定了基向量后,根据线性就已经确定了其他向量。对于两个向量 x,y ,根据(1)将得到(4)中的条件,对于基来说,这些向量的变换是比较自由的,但是当他们确定以后,每个向量的变换就确定了!
例4:什么样的线性变化将
x1,x2
变成
Ax1,Ax2
?
满足条件的矩阵为:
我们从另一个基 (1,1),(2,−1) 开始, A 是唯一的线性变换:
加些来我们找出表示微分和积分的矩阵。首先我们必须确定一个基,对于3次多项式,很自然的选择四个基向量:
基不是唯一的,但是某些选择确实必须的而且也是最方便的。这四个基向量的导数是
0,1,2t,3t2
:
d/dt
是一种运算,就像矩阵一样,但是是什么样的矩阵呢?考虑通常的四维空间,坐标向量为
p1=(1,0,0,0),p2=(0,1,0,0),p3=(0,0,1,0),p4=(0,0,0,1)
,由(5)确定的矩阵是:
Ap1
是第一列,也就是零,
Ap2
是第二列,也就是
p1
,
Ap3
是
2p2
,
Ap4
是
3p3
,零空间包含
p1
,列空间包含
p1,p2,p3
(立方的导数是平方)。根据线性,像
p=2+t−t2−t3
的导数可以确定出来:
总而言之,矩阵携带了所有的信息,如果基和矩阵都是已知的,那么每个矩阵的变换就是已知的。
信息编码很容易,将一个空间变换到它本身,一个基就足够了,从一个空间到另一个空间的变换需要其他的基。
21、假设向量
x1,…,xn
是空间
V
的一个基,向量
对于微分矩阵,列1来自于第一个基向量 p1=1 ,它的导数为0,所以列1为0,最后一列来自 (d/dt)t3=3t2 。因为 3t2=0p1+0p2+3p3+0p4 ,所以最后一列包含0,0,3,0,法则(6)一次得到矩阵的一列。
对于积分同样如此,它是从三次方到四次方,也就是
V=P3
到
W=P4
,所以我们需要
W
的一组基,很自然的选择是
积分和微分时逆运算,或者说从微分得到的积分可以还原到原来的函数,为了用矩阵表示,我们需要将微分矩阵变为
4×5
:
微分是积分的左逆,长方形矩阵不可能两边同时有逆!所以反过来 AintAdiff=I 是不成立的, 5×5 的话在第一行得到零,常数的导数为零,而 AintAdiff 的其他行和单位矩阵一样,因为 tn 微分后在积分还是 tn 。
旋转矩阵Q,投影矩阵P,反射矩阵H
本部分我们介绍90度的旋转矩阵,向
x
轴的投影矩阵和45度线的反射矩阵,他们的矩阵都很简单:
在 x−y 平面上的基本线性变换都是比较简单的,但是旋转其他角度,投影到任何一条线上,沿任何线做反射也是很容是可视化的,他们依然是线性变换,原点都是固定的: A0=0 ,肯定能用矩阵来表示。使用自然基 (1,0)T,(0,1)T 就可以找到这些矩阵。
1、旋转矩阵,图2所示旋转角度为 θ ,同时也显示了对两个基向量的效果。第一个变成 (cosθ,sinθ) ,长度为1保持不变;第二个基向量变成 (−sinθ,cosθ) ,根据规则(6),这些数放到矩阵的列中(我们用 c,s 分别表示 cosθsinθ ):
Qθ
的逆等于
Qθ
吗?是的。
Qθ
的平方等于
Q2θ
吗?是的。
Qθ
和
Qφ
的乘积等于
Qθ+φ
吗?是的。
最后一种情况包含前两种情况,当 φ=−θ 时就是第一种情况,当 φ=+θ 时就是第二种情况。这三个方程由三角恒等式确定,毫无例外所有答案都是肯定的,矩阵乘法定义的非常精确,这样的话他们的乘积就对应着变换的乘积。
22、假设
A,B
分别是从
V
到
对于 AdiffAint ,这个组合变换得到单位矩阵( AintAdiff 将常数消灭掉了)。对于两个旋转操作,乘法的顺序无所谓,那么 U=V=W 是 x−y 平面, QθQφ 和 QφQθ 是一样的。对于一个旋转和一个反射操作,顺序不同结果就不同。
注意:为了构建矩阵,我们需要
V,W
的基,然后
U,V
的基。为了跟
V
保持一样的基,矩阵乘法直接从
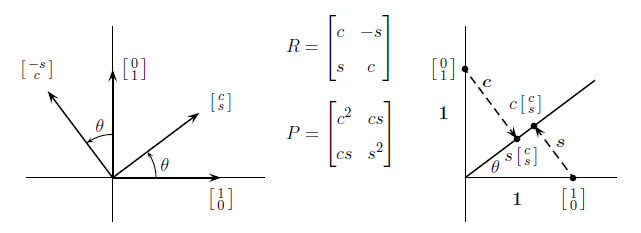
图2:旋转矩阵(左),反射矩阵(右)
2、投影矩阵,图2也给出了
(1,0)
到
θ
直线的投影,投影长度是
c=cosθ
,注意投影点不是
(c,s)
;向量长度为1,所以我们必须乘以
c
。同样,
这个矩阵没有逆,因为这个变换不是可逆的。垂线上的点映射到原点上;这条线是
P
的零空间。
其中 c2+s2=cos2θ+sin2θ=1 。投影矩阵等于它自身的平方。
3、反射矩阵,图3给出了
(1,0)
关于
θ
线的反射,反射的长度等于原始长度,就像旋转操作那样——但是这里
θ
线保持不变。垂线的方向反转了,
矩阵
H
有一个特别的性质:
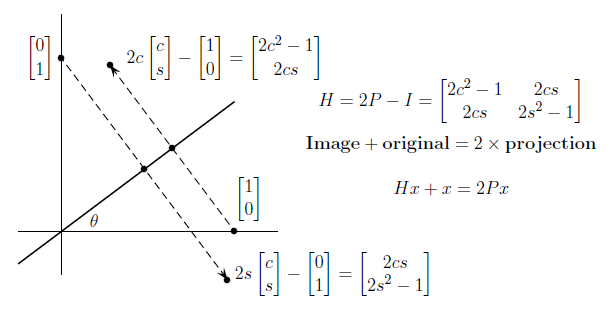
图3:反射:几何和矩阵
我们需要强调一下,矩阵依赖于所选择的基。假设第一个基在 θ 线上,第二个基向量跟它垂直:
- 对于投影,这个矩阵按如下方式构建:第一列就是第一个基向量(投影到自身),第二列就是投影为零的基向量。
- 对于反射,第二个基向量通过反射变成第一个向量的反方向,那个反射轴就是第二列。当矩阵
H,P
的基一样时,矩阵
H
依然满足
2P−I 。 - 对于旋转,矩阵不发生变换,跟之前一样。
选择一个最好的基明显是整个问题的核心,之后我们会形式介绍这个。
当线性变换不变时,基的改变会影响到矩阵,就像矩阵
A
变为

















 2044
2044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









