







VINS-FUSION 优化-IMU预积分因子(一)完成了IMU预积分及对于优化变量的全部雅克比矩阵的推导,本文结合VINS-FUSION源码,完成优化-IMU预积分因子的使用。
一、IMU预积分因子雅克比
VINS-FUSION源码中将优化变量分组如下:
1.对i时刻优化变量的雅可比
2.对j时刻优化变量的雅可比
二、IMU预积分因子源码
class IMUFactor : public ceres::SizedCostFunction<15, 7, 9, 7, 9> {
public:
IMUFactor() = delete;
IMUFactor(IntegrationBase* _pre_integration):pre_integration(_pre_integration) {}
virtual bool Evaluate(double const *const *parameters, double *residuals, double **jacobians) const {
Eigen::Vector3d Pi(parameters[0][0], parameters[0][1], parameters[0][2]);
Eigen::Quaterniond Qi(parameters[0][6], parameters[0][3], parameters[0][4], parameters[0][5]);
Eigen::Vector3d Vi(parameters[1][0], parameters[1][1], parameters[1][2]);
Eigen::Vector3d Bai(parameters[1][3], parameters[1][4], parameters[1][5]);
Eigen::Vector3d Bgi(parameters[1][6], parameters[1][7], parameters[1][8]);
Eigen::Vector3d Pj(parameters[2][0], parameters[2][1], parameters[2][2]);
Eigen::Quaterniond Qj(parameters[2][6], parameters[2][3], parameters[2][4], parameters[2][5]);
Eigen::Vector3d Vj(parameters[3][0], parameters[3][1], parameters[3][2]);
Eigen::Vector3d Baj(parameters[3][3], parameters[3][4], parameters[3][5]);
Eigen::Vector3d Bgj(parameters[3][6], parameters[3][7], parameters[3][8]);
Eigen::Map<Eigen::Matrix<double, 15, 1>> residual(residuals);
residual = pre_integration->evaluate(Pi, Qi, Vi, Bai, Bgi,
Pj, Qj, Vj, Baj, Bgj);
Eigen::Matrix<double, 15, 15> sqrt_info = Eigen::LLT<Eigen::Matrix<double, 15, 15>>(pre_integration->covariance.inverse()).matrixL().transpose();
//sqrt_info.setIdentity();
residual = sqrt_info * residual;
if (jacobians) {
double sum_dt = pre_integration->sum_dt;
Eigen::Matrix3d dp_dba = pre_integration->jacobian.template block<3, 3>(O_P, O_BA);
Eigen::Matrix3d dp_dbg = pre_integration->jacobian.template block<3, 3>(O_P, O_BG);
Eigen::Matrix3d dq_dbg = pre_integration->jacobian.template block<3, 3>(O_R, O_BG);
Eigen::Matrix3d dv_dba = pre_integration->jacobian.template block<3, 3>(O_V, O_BA);
Eigen::Matrix3d dv_dbg = pre_integration->jacobian.template block<3, 3>(O_V, O_BG);
if (pre_integration->jacobian.maxCoeff() > 1e8 || pre_integration->jacobian.minCoeff() < -1e8)
{
LOG(WARNING) << ("numerical unstable in preintegration");
//std::cout << pre_integration->jacobian << std::endl;
// ROS_BREAK();
}
if (jacobians[0])
{
Eigen::Map<Eigen::Matrix<double, 15, 7, Eigen::RowMajor>> jacobian_pose_i(jacobians[0]);
jacobian_pose_i.setZero();
jacobian_pose_i.block<3, 3>(O_P, O_P) = -Qi.inverse().toRotationMatrix();
jacobian_pose_i.block<3, 3>(O_P, O_R) = Utility::skewSymmetric(Qi.inverse() * (0.5 * G * sum_dt * sum_dt + Pj - Pi - Vi * sum_dt));
#if 0
jacobian_pose_i.block<3, 3>(O_R, O_R) = -(Qj.inverse() * Qi).toRotationMatrix();
#else
Eigen::Quaterniond corrected_delta_q = pre_integration->delta_q * Utility::deltaQ(dq_dbg * (Bgi - pre_integration->linearized_bg));
jacobian_pose_i.block<3, 3>(O_R, O_R) = -(Utility::Qleft(Qj.inverse() * Qi) * Utility::Qright(corrected_delta_q)).bottomRightCorner<3, 3>();
#endif
jacobian_pose_i.block<3, 3>(O_V, O_R) = Utility::skewSymmetric(Qi.inverse() * (G * sum_dt + Vj - Vi));
jacobian_pose_i = sqrt_info * jacobian_pose_i;
if (jacobian_pose_i.maxCoeff() > 1e8 || jacobian_pose_i.minCoeff() < -1e8)
{
LOG(WARNING) << ("numerical unstable in preintegration");
//std::cout << sqrt_info << std::endl;
//ROS_BREAK();
}
}
if (jacobians[1])
{
Eigen::Map<Eigen::Matrix<double, 15, 9, Eigen::RowMajor>> jacobian_speedbias_i(jacobians[1]);
jacobian_speedbias_i.setZero();
jacobian_speedbias_i.block<3, 3>(O_P, O_V - O_V) = -Qi.inverse().toRotationMatrix() * sum_dt;
jacobian_speedbias_i.block<3, 3>(O_P, O_BA - O_V) = -dp_dba;
jacobian_speedbias_i.block<3, 3>(O_P, O_BG - O_V) = -dp_dbg;
#if 0
jacobian_speedbias_i.block<3, 3>(O_R, O_BG - O_V) = -dq_dbg;
#else
//Eigen::Quaterniond corrected_delta_q = pre_integration->delta_q * Utility::deltaQ(dq_dbg * (Bgi - pre_integration->linearized_bg));
//jacobian_speedbias_i.block<3, 3>(O_R, O_BG - O_V) = -Utility::Qleft(Qj.inverse() * Qi * corrected_delta_q).bottomRightCorner<3, 3>() * dq_dbg;
jacobian_speedbias_i.block<3, 3>(O_R, O_BG - O_V) = -Utility::Qleft(Qj.inverse() * Qi * pre_integration->delta_q).bottomRightCorner<3, 3>() * dq_dbg;
#endif
jacobian_speedbias_i.block<3, 3>(O_V, O_V - O_V) = -Qi.inverse().toRotationMatrix();
jacobian_speedbias_i.block<3, 3>(O_V, O_BA - O_V) = -dv_dba;
jacobian_speedbias_i.block<3, 3>(O_V, O_BG - O_V) = -dv_dbg;
jacobian_speedbias_i.block<3, 3>(O_BA, O_BA - O_V) = -Eigen::Matrix3d::Identity();
jacobian_speedbias_i.block<3, 3>(O_BG, O_BG - O_V) = -Eigen::Matrix3d::Identity();
jacobian_speedbias_i = sqrt_info * jacobian_speedbias_i;
//ROS_ASSERT(fabs(jacobian_speedbias_i.maxCoeff()) < 1e8);
//ROS_ASSERT(fabs(jacobian_speedbias_i.minCoeff()) < 1e8);
}
if (jacobians[2])
{
Eigen::Map<Eigen::Matrix<double, 15, 7, Eigen::RowMajor>> jacobian_pose_j(jacobians[2]);
jacobian_pose_j.setZero();
jacobian_pose_j.block<3, 3>(O_P, O_P) = Qi.inverse().toRotationMatrix();
#if 0
jacobian_pose_j.block<3, 3>(O_R, O_R) = Eigen::Matrix3d::Identity();
#else
Eigen::Quaterniond corrected_delta_q = pre_integration->delta_q * Utility::deltaQ(dq_dbg * (Bgi - pre_integration->linearized_bg));
jacobian_pose_j.block<3, 3>(O_R, O_R) = Utility::Qleft(corrected_delta_q.inverse() * Qi.inverse() * Qj).bottomRightCorner<3, 3>();
#endif
jacobian_pose_j = sqrt_info * jacobian_pose_j;
//ROS_ASSERT(fabs(jacobian_pose_j.maxCoeff()) < 1e8);
//ROS_ASSERT(fabs(jacobian_pose_j.minCoeff()) < 1e8);
}
if (jacobians[3])
{
Eigen::Map<Eigen::Matrix<double, 15, 9, Eigen::RowMajor>> jacobian_speedbias_j(jacobians[3]);
jacobian_speedbias_j.setZero();
jacobian_speedbias_j.block<3, 3>(O_V, O_V - O_V) = Qi.inverse().toRotationMatrix();
jacobian_speedbias_j.block<3, 3>(O_BA, O_BA - O_V) = Eigen::Matrix3d::Identity();
jacobian_speedbias_j.block<3, 3>(O_BG, O_BG - O_V) = Eigen::Matrix3d::Identity();
jacobian_speedbias_j = sqrt_info * jacobian_speedbias_j;
//ROS_ASSERT(fabs(jacobian_speedbias_j.maxCoeff()) < 1e8);
//ROS_ASSERT(fabs(jacobian_speedbias_j.minCoeff()) < 1e8);
}
}
return true;
}
//bool Evaluate_Direct(double const *const *parameters, Eigen::Matrix<double, 15, 1> &residuals, Eigen::Matrix<double, 15, 30> &jacobians);
//void checkCorrection();
//void checkTransition();
//void checkJacobian(double **parameters);
IntegrationBase* pre_integration;
};源码使用ceres解析求导:
1.构建一个继承自ceres::SizedCostFunction的类
class IMUFactor : public ceres::SizedCostFunction<15, 7, 9, 7, 9>
参数分别表示为:残差维度15,优化参数维度,优化参数
维度,优化参数
维度,优化参数
维度。
2.重载纯虚函数
virtual bool Evaluate(double const *const *parameters, double *residuals, double **jacobians)
根据输入优化参数块,实现残差和雅克比矩阵的计算。
其中:
(1)Pi,Qi表示i帧位姿,对应
(2)Vi,Bai,Bgi表示i帧速度、加速度bias、加速度bias,对应
(3)Pj,Qj表示i帧位姿,对应
(4)Vj,Baj,Bgj表示i帧速度、加速度bias、加速度bias,对应
雅可比矩阵是在预积分中实现。
3.残差求解evaluate
Eigen::Matrix<double, 15, 1> evaluate(
const Eigen::Vector3d &Pi, const Eigen::Quaterniond &Qi, const Eigen::Vector3d &Vi, const Eigen::Vector3d &Bai, const Eigen::Vector3d &Bgi,
const Eigen::Vector3d &Pj, const Eigen::Quaterniond &Qj, const Eigen::Vector3d &Vj, const Eigen::Vector3d &Baj, const Eigen::Vector3d &Bgj) {
/// NOTE: xxx
Eigen::Matrix<double, 15, 1> residuals;
Eigen::Matrix3d dp_dba = jacobian.block<3, 3>(O_P, O_BA);
Eigen::Matrix3d dp_dbg = jacobian.block<3, 3>(O_P, O_BG);
Eigen::Matrix3d dq_dbg = jacobian.block<3, 3>(O_R, O_BG);
Eigen::Matrix3d dv_dba = jacobian.block<3, 3>(O_V, O_BA);
Eigen::Matrix3d dv_dbg = jacobian.block<3, 3>(O_V, O_BG);
Eigen::Vector3d dba = Bai - linearized_ba;
Eigen::Vector3d dbg = Bgi - linearized_bg;
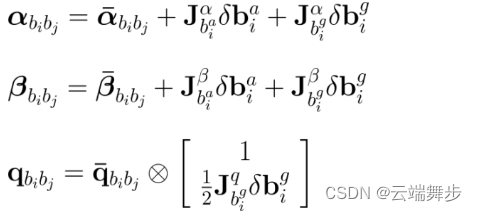
Eigen::Quaterniond corrected_delta_q = delta_q * Utility::deltaQ(dq_dbg * dbg);
Eigen::Vector3d corrected_delta_v = delta_v + dv_dba * dba + dv_dbg * dbg;
Eigen::Vector3d corrected_delta_p = delta_p + dp_dba * dba + dp_dbg * dbg;
residuals.block<3, 1>(O_P, 0) = Qi.inverse() * (0.5 * G * sum_dt * sum_dt + Pj - Pi - Vi * sum_dt) - corrected_delta_p;
residuals.block<3, 1>(O_R, 0) = 2 * (corrected_delta_q.inverse() * (Qi.inverse() * Qj)).vec();
residuals.block<3, 1>(O_V, 0) = Qi.inverse() * (G * sum_dt + Vj - Vi) - corrected_delta_v;
residuals.block<3, 1>(O_BA, 0) = Baj - Bai;
residuals.block<3, 1>(O_BG, 0) = Bgj - Bgi;
return residuals;
}
jacobians组成如下:
 |  |
注:待优化变量如上,但实际求雅可比矩阵是用的优化变量的误差量(扰动量)。
故:dp_dba表示残差p对ba的雅可比矩阵,对应jacobians第0行9列,dp_dbg、dq_dbg、dv_dba、dv_dbg如图就很好理解了。
4.雅克比矩阵
雅克比矩阵对应小节一中IMU预积分因子雅克比公式。
5.方差矩阵
代码中sqrt_info表示信息矩阵,等于方差的逆矩阵,如下:
Eigen::Matrix<double, 15, 15> sqrt_info = Eigen::LLT<Eigen::Matrix<double, 15, 15>>(pre_integration->covariance.inverse()).matrixL().transpose();
三、参考
1.VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
2.Online Temporal Calibration for Monocular Visual-Inertial Systems
3.https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
4.多传感器融合定位-基于图优化的建图方法
















 439
439











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









