







写在前面
PID是控制领域最基础应用最广泛的控制算法,在项目中经常用到,之前为了教学和项目需要,学习整理过一些学习资料,在该分栏下,将做系统化分享。本文介绍控制系统基础之一,重点从自控理论发展简史、自动控制概念、控制系统的基本控制方式三个方面进行阐述。
一、自动控制理论发展简史
首先,我们把自动控制原理发展的历史给大家简要的说明一下,因为我们做控制方面工作的,了解一下咱们控制理论的发展是很有必要的。控制理论的发展阶段可以归纳为三个主要的发展阶段。
- 经典控制理论 ( 19世纪初—20世纪50年代)
- 时域法
- 复域法 (根轨迹法)
- 频域法
这三个方法都是用来进行系统分析、系统设计的不同方法。迄今为止,经典控制系统发展的已经非常完善了,它们主要是解决单输入单输出线性定常系统中涉及分析和设计的问题。
- 现代控制理论 ( 20世纪60年代— )
- 线性系统
线性系统是解决多输入多输出系统的一般性理论
- 最优控制
最优控制是解决当某一控制目标给定后,用什么样的控制策略的问题。
- 最佳估计
最佳估计是说当系统当中测量出来以后,有噪声的情况下,你怎么能够想办法把包含在有效信号里的噪声给滤除掉,把干净的信号用来反馈控制,研究这样一个问题。
- 系统辨识
系统辨识主要是用来解决系统模型的建立的问题。
- 自适应控制
- 鲁棒控制
- 容错控制
- 集散控制
- 预测控制
- 滑模控制
- 大系统复杂系统
- 非线性系统理论
从现代控制理论的角度来讲,它的传统的学术分支一共有四个,线性系统、最优控制、最佳估计、系统辨识。现代控制理论还在持续的发展当中,随后产生的许多学科分支领域的知识也为我们提供了很多解决控制领域问题的工具。
- 智能控制理论 ( 20世纪70年代— )
- 专家系统
- 模糊控制
- 神经网络
- 遗传算法
- 多智能体
由于计算机技术的飞速发展,为控制理论提供了新的技术手段,很多没有办法解决的问题通过计算机得到了很好的解决。
接下来要学习的重点内容都是经典控制理论的内容。
二、什么是自动控制?
在无人直接参与的情况下,利用控制装置,使工作机械或生产过程(被控对象)的某一个物理量(被控量)按预定的规律(给定量)运行。
三、控制方式
控制系统的控制方式主要分成三种:开环控制、闭环控制和复合控制,下面将一一介绍这三种控制方式。
3.1 开环控制系统
1. 一般开环控制系统

一个系统一般是有输入和输出,如图所示,期望输出即为输入,我们叫它 r i n rin rin,实际输出即为输出,我们叫它 y o u t yout yout。输入信号给到控制器,这是我们的PID控制器,PID是根据输入进行一个运算,得到一个计算结果叫控制输出,计作 u ( t ) u(t) u(t)。控制器输出的控制信号给到执行器,执行器给出反应 u ( a ) u(a) u(a),作用到对象上,然后输出一个 y o u t yout yout。这就是一个一般开环控制系统。
2. 前馈控制系统
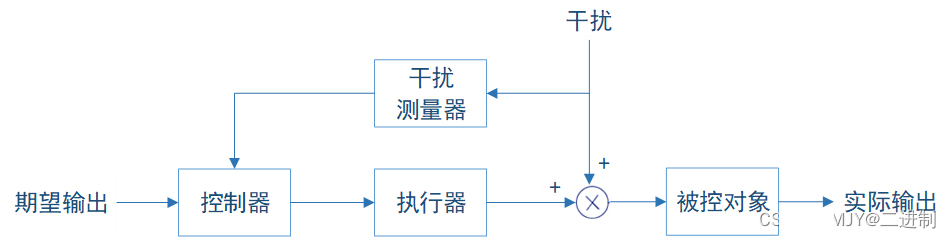
如图,与一般开环控制系统相比,前馈控制系统中多了一个干扰,这个干扰直接作用到对象上。执行器本来直接作用到对象上之后系统运行是正常的,但是现在加了干扰,系统就运行不正常了,那么现在怎么办呢?那就补偿这个干扰,这就需要在干扰前面加一个干扰测量器,测量器得到的数据传输给控制器,控制器根据干扰的大小来计算出给执行器补偿多少,然后执行器根据补偿的信号就补偿了这个干扰对对象的作用。比如这个干扰是让对象是减1的,那控制器这边算出的信号给执行器,执行器作用到对象的作用要加1,这样就补偿了一个干扰。
3.2 闭环控制系统
1. 单闭环控制系统
单闭环控制系统比开环控制系统多了一个闭环回路,即实际的输出会反馈给输入端。

如图所示,输入信号不是直接给控制器,还有一个实际输出的反馈,所以控制器的输入是一个期望输出与实际输出的偏差 E E E, E = r i n − y o u t E=rin-yout E=rin−yout,控制器处理了这个偏差输入信号输出一个 u ( t ) u(t) u(t),再给到执行器得到 u ( a ) u(a) u(a),执行器作用到对象,对象输出 y o u t yout yout,这就是单闭环控制系统原理。
2. 双闭环控制系统
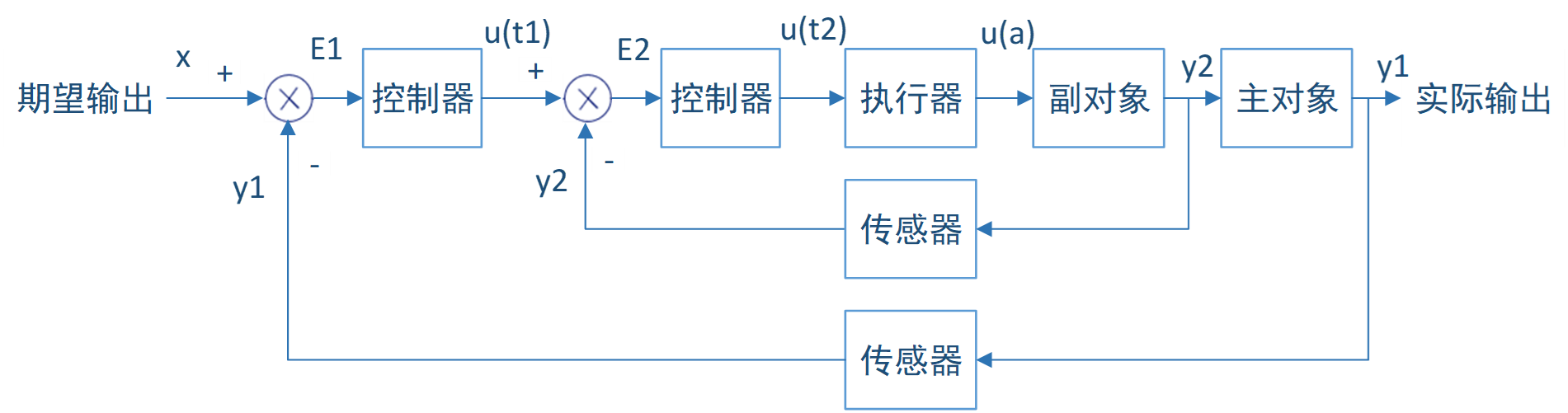
双闭环与单闭环有什么不同?单闭环是只有一个闭环回路,双闭环是在单闭环外面再加一个环,因此叫双闭环。在工程上,把里面的环叫做内环,外面的环叫做外环。
双闭环比单闭环多了一个对象,一个主对象,一个副对象,主对象的输出设为 y 1 y1 y1,副对象的输出设为 y 2 y2 y2。主对象的输出会给到外环输入端,副对象的输出会给到内环输入端。设期望输出,也就是输入为 x x x,控制器的输入就是 E 1 = x − y 1 E1=x-y1 E1=x−y1,经过控制器输出 u ( t 1 ) u(t1) u(t1),再与副对象输出反馈 y 2 y2 y2 做差,得到 E 2 E2 E2, E 2 E2 E2 再输入第二个控制器,输出 u ( t 2 ) u(t2) u(t2),然后作用到执行器,这里信号记为 u ( a ) u(a) u(a),首先作用到副对象输出 y 2 y2 y2,然后副对象再作用到主对象输出 y 1 y1 y1。这就是双闭环控制系统原理。
3.3 复合控制系统
复合控制系统,全称我们叫前馈反馈复合控制系统。
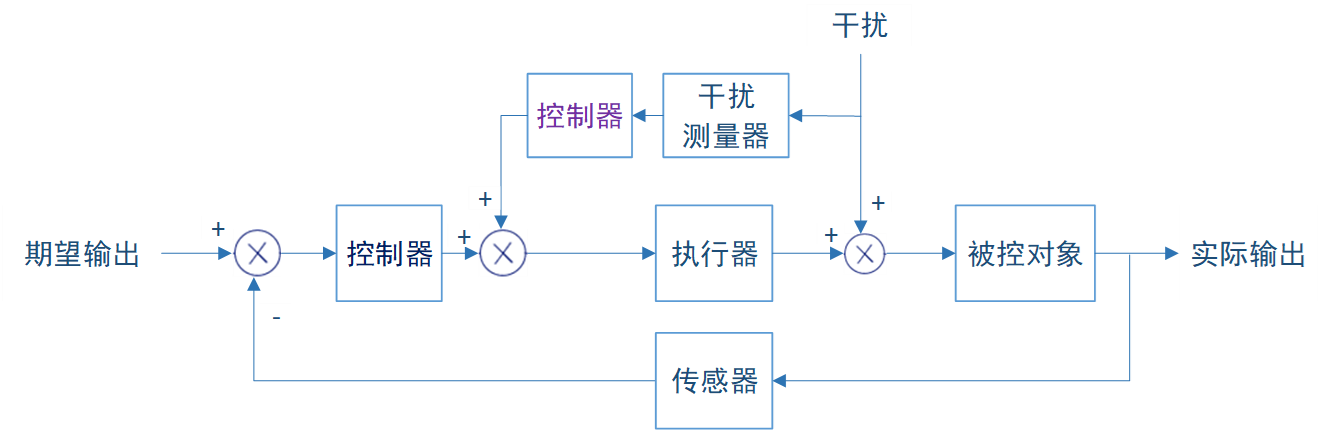
如图所示,下面这部分是一个闭环,上面是一个前馈。首先,看一下这个干扰,干扰作用于对象,有一个扰动的作用。我们要设置一个回路,把这个干扰检测出来,检测出来的信号给到这个前馈控制器,前馈控制器作用到这个执行器,使得前馈通道对对象的作用可以抵消这个干扰对对象的作用。下面这个环起到一个反馈的作用,达到一个更精准的控制,那么这个就是前馈反馈控制系统原理。



















 6420
6420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











