







参考:https://zhuanlan.zhihu.com/p/470786175
| 对应类 | 对应头文件 | 算法描述 |
|---|---|---|
| pcl::ShapeContext3DEstimation< PointInT, PointNT, PointOutT > | #include <pcl/features/3dsc.h> | 实现3D形状内容描述子算法 |
| pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT > | – | 实现局部坐标系估计的方法 特别是处理点云边缘或有孔洞有特殊的处理方式 |
| pcl::BoundaryEstimation< PointInT, PointNT, PointOutT > | – | 实现估计一组点集是否处于指定点的投影区域的边缘位置 |
| pcl::CRHEstimation< PointInT, PointNT, PointOutT > | – | 实现摄像头旋转直方图描述子,利用概算法主要进行刚体对象的位姿估计 |
| pcl::CVFHEstimation< PointInT, PointNT, PointOutT > | – | 实现聚类视点直方图CVFH描述子的计算 主要是针对解决有残缺的点云识别问题 |
| pcl::ESFEstimation< PointInT, PointOutT > | – | 实现ESF描述子,主要用于实时对三维场景中的点云模型进行分类而提出的 |
| pcl::PFHEstimation< PointInT, PointNT, PointOutT > | #include <pcl/features/fpfh.h> | 快速点特征直方图描述子 |
| pcl::MomentOfInertiaEstimation< PointInT> | #include <pcl/features/moment_of_inertia_estimation.h> | 基于偏心率和惯性矩的描述特征 |
| pcl::ROPSEstimation< PointInT, PointOutT > | #include <pcl/features/rops_estimation.h> | Rops(Rotational Projection Statistics)旋转投影统计特征 |
| pcl::SHOTEstimation< PointInT, PointOutT > | #include <pcl/features/shot.h> | SHOT(Signature of Histograms of OrienTations)方向直方图特征 |
PFH特征提取
#include<iostream>
#include<vector>
#include <pcl/point_types.h>
#include <pcl/features/pfh.h>
#include <pcl/io/pcd_io.h>//点云文件pcd 读写
#include <pcl/features/normal_3d.h>//法线特征
#include <pcl/visualization/pcl_plotter.h>// 直方图的可视化 方法2
using namespace std;
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
//======【1】 读取点云文件 填充点云对象======
pcl::PCDReader reader;
reader.read("mesh.pcd", *cloud_ptr);
// =====【2】计算法线========创建法线估计类====================================
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud_ptr);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);//设置近邻搜索算法
// 输出点云 带有法线描述
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals_ptr(new pcl::PointCloud<pcl::Normal>);
pcl::PointCloud<pcl::Normal>& cloud_normals = *cloud_normals_ptr;
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch(0.03);//半价内搜索临近点 3cm
// 计算表面法线特征
ne.compute(cloud_normals);
//=======【3】创建PFH估计对象pfh,并将输入点云数据集cloud和法线normals传递给它=================
pcl::PFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::PFHSignature125> pfh;// phf特征估计其器
pfh.setInputCloud(cloud_ptr);
pfh.setInputNormals(cloud_normals_ptr);
//如果点云是类型为PointNormal,则执行pfh.setInputNormals (cloud);
//创建一个空的kd树表示法,并把它传递给PFH估计对象。
//基于已给的输入数据集,建立kdtree
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree2(new pcl::search::KdTree<pcl::PointXYZ>());
//pcl::KdTreeFLANN<pcl::PointXYZ>::Ptr tree2 (new pcl::KdTreeFLANN<pcl::PointXYZ> ()); //-- older call for PCL 1.5-
pfh.setSearchMethod(tree2);//设置近邻搜索算法
//输出数据集
pcl::PointCloud<pcl::PFHSignature125>::Ptr pfh_fe_ptr(new pcl::PointCloud<pcl::PFHSignature125>());//phf特征
//使用半径在5厘米范围内的所有邻元素。
//注意:此处使用的半径必须要大于估计表面法线时使用的半径!!!
pfh.setRadiusSearch(0.05);
//计算pfh特征值
pfh.compute(*pfh_fe_ptr);
cout << "phf feature size : " << pfh_fe_ptr->points.size() << endl;
// 应该与input cloud->points.size ()有相同的大小,即每个点都有一个pfh特征向量
// ========直方图可视化=============================
pcl::visualization::PCLPlotter plotter;
plotter.addFeatureHistogram(*pfh_fe_ptr, 300); //设置的很坐标长度,该值越大,则显示的越细致
plotter.plot();
return 0;
}
SHOT特征提取
基本原理:
-
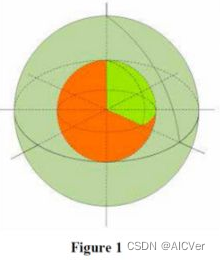
根据特征点球邻域信息建立局部参考坐标系LRF,对特征点的球邻域分别沿径向(内外球)、经度(时区)和纬度方向(南北半球)进行区域划分。通常径向划分为2,经度划分为8,纬度划分为2,总共32个小区域。
-
分别统计每个小区域内的法向量夹角余弦值分布情况,法向量划分为11个bin。最终SHOT的长度为:32x11=352。
-
代码如下:
void KeyPoints::getFeatures(PointCloudXYZ::Ptr &cloud, PointCloudXYZ::Ptr &keys, pcl::PointCloud<pcl::SHOT352>::Ptr features, pcl::PointCloud<pcl::Normal>::Ptr cloud_normal) { clock_t begin = clock(); //pcl::SHOTEstimation<pcl::PointXYZ, pcl::Normal, pcl::SHOT352> shot; pcl::SHOTEstimationOMP<pcl::PointXYZ, pcl::Normal, pcl::SHOT352> shot; shot.setRadiusSearch(KeyPoints::search_radius); shot.setInputCloud(keys); shot.setSearchSurface(cloud); shot.setInputNormals(cloud_normal); shot.compute(*features); clock_t end = clock(); std::cout << "compute feature time is "<<(end-begin)<<"\n"; cout << "输入点云的大小是" << cloud->points.size() << endl; }















 1902
1902











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











