






前言
老师那边突然说要做激光雷达联合相机采集数据的实验,时间紧任务重,在这个过程中也不可避免遇到了许多的坑,遂记录下来,同时也作为一个教程给大家
顺便写一下我的配置:
Ubuntu 20.04 + ROS1 noetic
速腾雷达 RS-Ruby 128线
海康威视全景相机 DS-2CD6984F
MATLAB2024a
程序如下:https://github.com/li01233/mul_modal_ROS.git
一 准备工作
1 雷达连接
RoboSense激光雷达使用(Windows)_激光雷达和电脑通讯-CSDN博客
这部分其实速腾官网的说明文档和网上的一些文档说得很清楚了,只要把自己电脑设成固定网段192.168.1.xxx就行了,但我各种配,就是连上了没数据
中间各种折腾,又是关防火墙又是设置入站规则的,还禁用了所有的网卡
最后发现问题相当逆天……
首先,用Wireshark可以确定雷达是192.168.1.200,然后打开cmd是ping得通的
接下来,打开浏览器输入192.168.1.200,进入雷达初始配置界面:
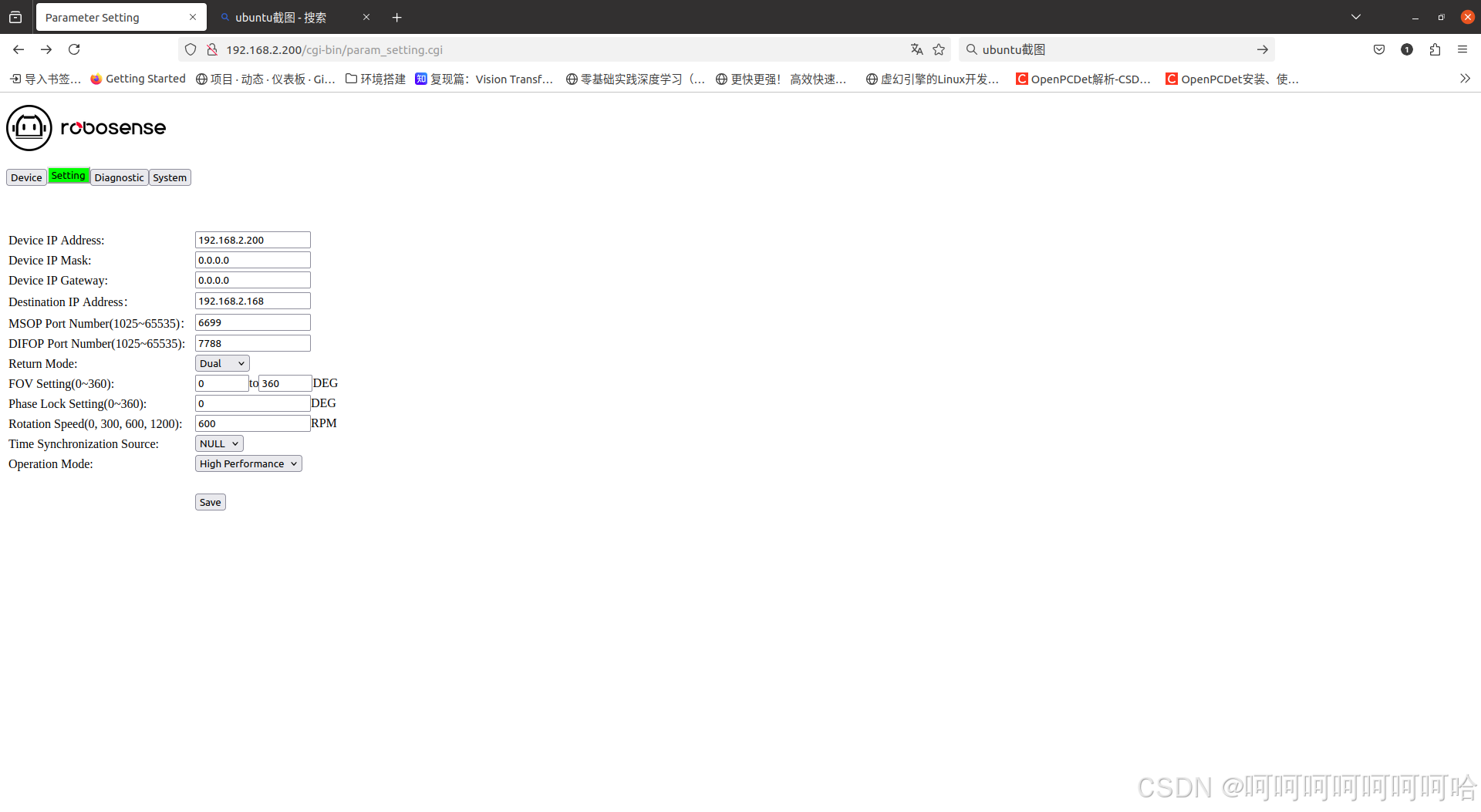
注意到,第一是Destination IP Address这里,要设成你的电脑的固定IP:192.168.1.xxx
第二,就是Rotation Speed不能为0……(不然完全没有数据出来)(为什么你不转都能升到70度啊!)
至于是如何发现我压根没开雷达……在Wireshark中我只看到了来自7788端口的数据(DIFOP一般是设备的一些信息),而没有6699的(MSOP是点云的),所以很明显……但我是万万没想到他没转啊!
2 相机连接
相机就简单太多了,首先用SADP找到相机的IP(默认一般是192.168.1.64,http端口80),并且在这个软件里激活相机
海康威视摄像头初始化设置(新相机的第一次配置&相机恢复出厂设置)_海康威视摄像头初始化软件-CSDN博客
最后在浏览器里输入192.168.1.64:http端口,然后愉快输入用户名admin,密码(你刚才激活时设置的),就可以看到画面了
3 固定支架制作
这部分就不写了,反正你既然要联合标定,肯定要把这俩的相对位置固定了
这里我直接solidworks建模了一个,找工厂做了
二 ROS安装与驱动编译
1 ROS安装
ROS安装属于老生常谈的话题,我推荐看这一篇,因为我看其他的多多少少碰过问题
1.2.4 安装 ROS · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
遇到连接不到packages.ros.org问题可以看我另一篇博客
ROS安装时连接不到packages.ros.org解决方法-CSDN博客
2 雷达驱动下载与编译
激光雷达是官方有sdk,所以直接到他底下下载了,然后根据readme一步一步做的
首先下源码
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update安装依赖库
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
sudo apt-get install -y libpcap-dev
编译运行:
(1) 新建一个文件夹作为工作空间,然后再新建一个名为src的文件夹, 将rslidar_sdk工程放入src文件夹内。
(2) 返回工作空间目录,执行以下命令即可编译&运行(若使用.zsh,将第二句指令替换为 source devel/setup.zsh)。
catkin_make
# 用了conda环境的用这一行
# catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
source devel/setup.bash
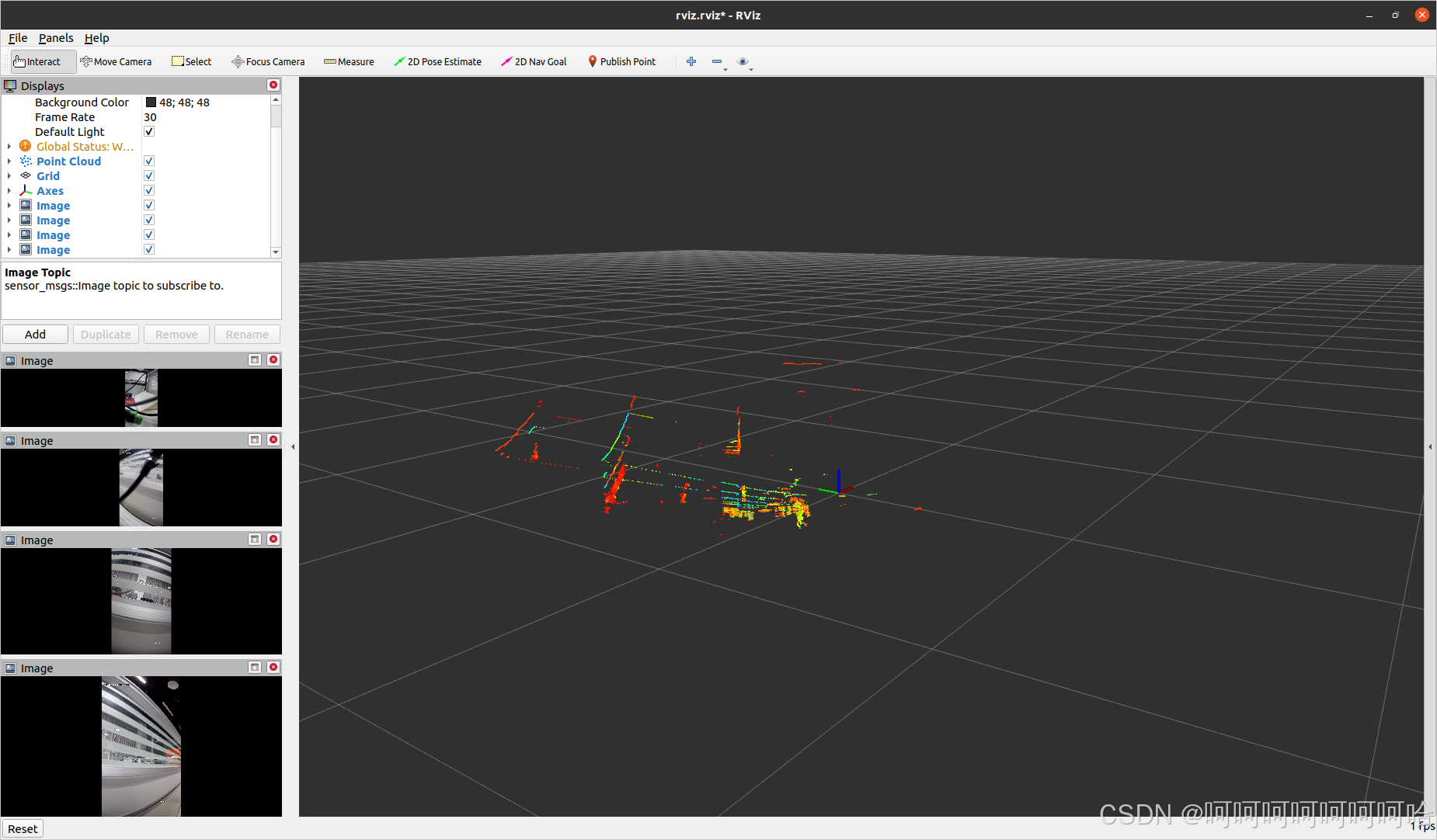
roslaunch rslidar_sdk start.launch然后就会在你的rviz中愉快地显示点云了~
3 相机驱动下载与编译
这部分我一开始没看清我相机的型号,直接参考了GitHub - luckyluckydadada/HIKROBOT-MVS-CAMERA-ROS: The ros driver package of Hikvision Industrial Camera SDK.的方法,又是安装海康的MVS软件又是折腾BLAS什么什么的库,在那把BLAS,CBLAS,LAPACKE什么全部装好了,才发现根本搜不到我的相机……MVS软件里也找不到,一搜,只支持工业相机啊!
好吧,从头再来
还好让我找到了我这种DS打头的监控相机的ROS驱动,感谢感谢!
GitHub - tanzby/hikvision_ros: simple preview bridge node of hikvision IP camera for ROS
同样的把它放在工作空间目录的src目录下,和rslidar_sdk同一层,然后catkin_make即可
git clone https://github.com/tanzby/hikvision_ros.git
# cd到工作空间根目录
catkin_make三 数据录制
1 改配置文件
检查相机配置:在src/hikvision/launch/hik.launch中更改ip等如下
<arg name="ip_addr" default="192.168.1.xxx"/>
<arg name="user_name" default="admin"/>
<arg name="password" default="********"/>因为我的全景相机有多个通道,所以我复制粘贴了多个节点,每个节点手动设置了通道,在src/hikvision/launch/hik.launch如下
<node pkg="hikvision_ros" type="hik_cam_node" name="hik_cam_node_1" output="screen">
<!-- modify LD_LIBRARY_PATH for loading hikvision sdk -->
<env name="LD_LIBRARY_PATH"
value="$(env LD_LIBRARY_PATH):$(find hikvision_ros)/lib:$(find hikvision_ros)/lib/HCNetSDKCom"/>
<param name="ip_addr" value="$(arg ip_addr)" />
<param name="user_name" value="$(arg user_name)" />
<param name="password" value="$(arg password)" />
<param name="port" value="$(arg port)" />
<param name="channel" value="1"/>
<param name="link_mode" value="$(arg link_mode)"/>
<param name="image_width" value="$(arg image_width)"/>
<param name="image_height" value="$(arg image_height)"/>
<param name="camera_frame_id" value="$(arg camera_frame_id)"/>
<param name="camera_name" value="$(arg camera_name)"/>
<param name="camera_info_url" value="$(arg camera_info_url)"/>
</node>检查雷达配置:在src/rslidar_sdk/config/config.yaml中更改雷达型号为RS128
2 启动!
运行ros
roscore启动新的一个终端,用于运行相机节点
source devel/setup.sh
roslaunch hikvision_ros hik.launch再启动一个终端,用于运行雷达节点
source devel/setup.bash
roslaunch rslidar_sdk start.launch在弹出的rviz中可以添加image,用于同时展示图像和点云数据。使用rostopic list可以查看发布了的话题
3 录制并解析数据
启动一个新终端,使用rosbag记录数据xxx.bag(这里我录制的是压缩了的图像数据,不然太大了)
rosbag record /rslidar_points /hik_cam_node_1/hik_camera/compressed /hik_cam_node_2/hik_camera/compressed /hik_cam_node_3/hik_camera/compressed /hik_cam_node_4/hik_camera/compressed -O xxx解析bag数据到jpg和pcd,用时间戳命名,这里参考了从bag包中提取图片和点云数据为pcd格式点云文件-CSDN博客
#! /usr/bin/python
# coding=utf-8
import os
import rosbag
import cv2
from cv_bridge import CvBridge
from tqdm import tqdm
class ExtractBagData(object):
def __init__(self, bagfile_path, camera_topic, pointcloud_topic, root):
self.bagfile_path = bagfile_path
self.camera_topic = camera_topic
self.pointcloud_topic = pointcloud_topic
self.root = root
self.image_dir = os.path.join(root, "images")
self.pointcloud_dir = os.path.join(root, "pointcloud")
#创建提取图片和点云的目录 ./root/images root/pointcloud
if not os.path.exists(self.image_dir):
os.makedirs(self.image_dir)
if not os.path.exists(self.pointcloud_dir):
os.makedirs(self.pointcloud_dir)
def extract_camera_topic(self):
bag = rosbag.Bag(self.bagfile_path, "r")
bridge = CvBridge()
for i in range(1,len(self.camera_topic)+1):
bag_data_imgs = bag.read_messages(self.camera_topic[i-1])
image_dir = os.path.join(self.image_dir, str(i))
index = 0
pbar = tqdm(bag_data_imgs)
for topic, msg, t in pbar: # type: ignore
pbar.set_description("Processing extract image id: %s" % (index+1))
cv_image = bridge.compressed_imgmsg_to_cv2(msg, "bgr8")
# 如果你需要使用时间戳对提取的图片命名,可以使用msg.header.stamp.to_sec()获取时间戳
timestr = "%.6f" % msg.header.stamp.to_sec()
cv2.imwrite(os.path.join(image_dir, str(timestr) + ".jpg"), cv_image) # type: ignore
index += 1
def extract_pointcloud_topic(self):
'''
# 提取点云数据为pcd后缀文件,默认提取以为时间戳命名
# 提取命令:rosrun pcl_ros bag_to_pcd result.bag /velodyne_points ./pointcloud
# 提取点云以时间戳命令:1616554905.476288682.pcd
:return:
'''
cmd = "rosrun pcl_ros bag_to_pcd %s /rslidar_points %s" % (self.bagfile_path, self.pointcloud_dir)
os.system(cmd)
# 再读取提取的pcd点云数据,把文件名修改为按照顺序索引名
#pcd_files_list = os.listdir(self.pointcloud_dir)
# 因为提取的pcd是以时间戳命令的,但是存放到列表中并不是按照时间戳从小到大排列,这里对时间戳进行重新排序
#pcd_files_list_sorted = sorted(pcd_files_list)
# print(zip(pcd_files_list, pcd_files_list_sorted))
#index = 0
#pbar = tqdm(pcd_files_list_sorted)
#for pcd_file in pbar:
# pbar.set_description("Processing extract poindcloud id: %s" % (index + 1))
# os.rename(os.path.join(self.pointcloud_dir, pcd_file),
# os.path.join(self.pointcloud_dir, str(index) + ".pcd"))
# print("pcd_file name: ", pcd_file)
# index += 5
if __name__ == '__main__':
#需要处理的bag包的路径
bagfile_path = './2024-11-30-22-02-42.bag'
camera_topic = ["/hik_cam_node_1/hik_camera/compressed","/hik_cam_node_2/hik_camera/compressed",
"/hik_cam_node_3/hik_camera/compressed","/hik_cam_node_4/hik_camera/compressed"]
pointcloud_topic = "/rslidar_points"
#将bag转换为pcd和jpg格式的保存路径
extract_bag = ExtractBagData(bagfile_path, camera_topic, pointcloud_topic, "./")
extract_bag.extract_camera_topic()
extract_bag.extract_pointcloud_topic()
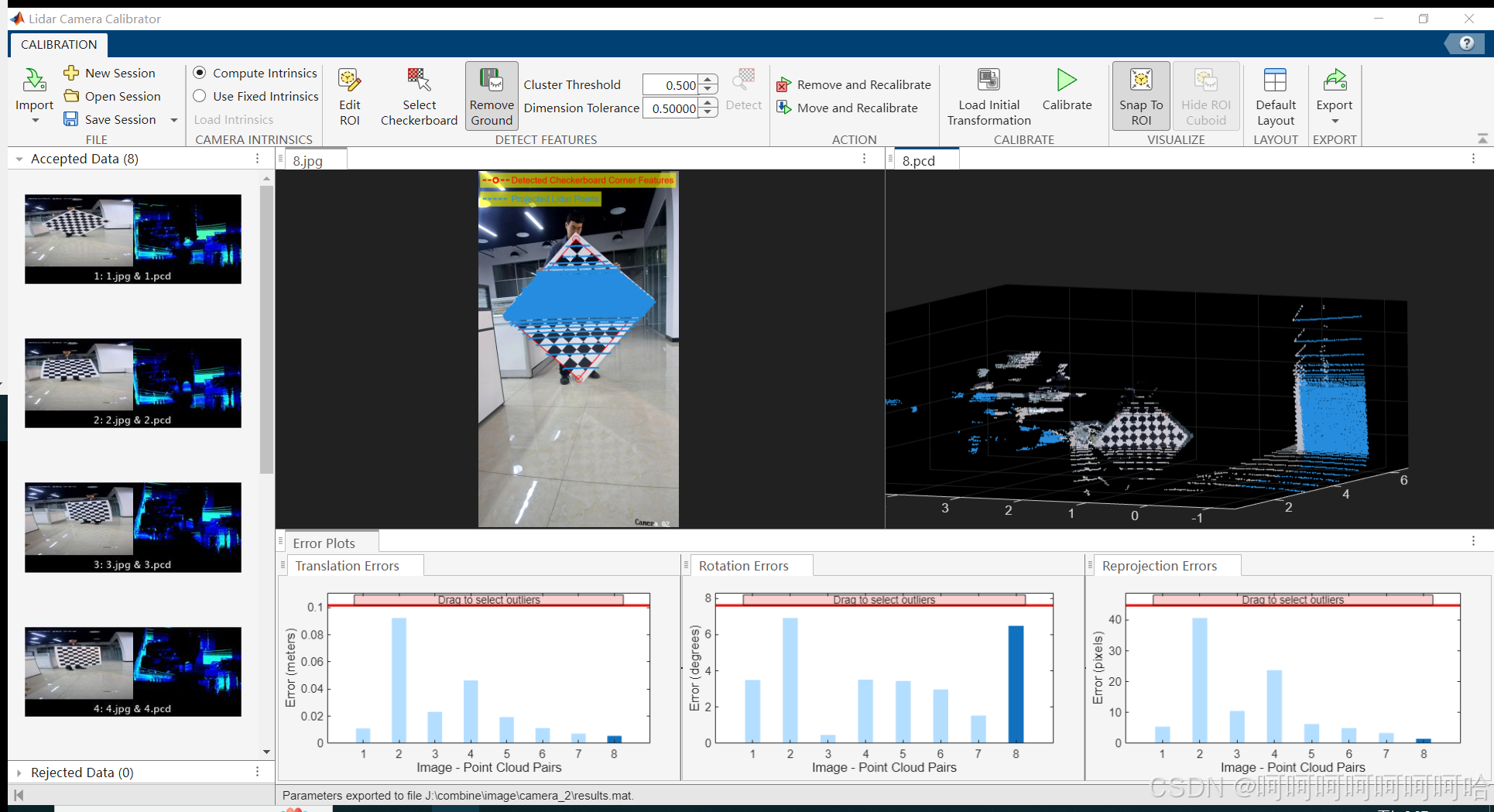
四 联合标定
上面的步骤采集到了pcd和jpg成帧的数据,就可以直接转移到MATLAB中进行联合标定了
激光雷达和相机联合标定保姆级教程_激光雷达标定-CSDN博客
MATLAB要R2022以上的~
这部分就是纯折磨了,没什么了
五 消息同步与消除NaN
消息同步和消除NaN部分我独立建了一个包mess_sync,使用message_filter去同步这么4个相机+1个点云共五个话题,同时使用pcl库,将有序点云转为无序点云,并清除其中的NaN值,大大缩小了文件的大小
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/sync_policies/exact_time.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/CompressedImage.h>
#include <ros/ros.h>
#include <iostream>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/filters/filter.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
using namespace std;
using namespace sensor_msgs;
using namespace message_filters;
ros::Publisher Img_info_pub1, Img_info_pub2, Img_info_pub3, Img_info_pub4;
ros::Publisher PC_info_pub;
void callback(const sensor_msgs::PointCloud2::ConstPtr& ori_pointcloud, const sensor_msgs::CompressedImage::ConstPtr& ori_img1,
const sensor_msgs::CompressedImage::ConstPtr& ori_img2, const sensor_msgs::CompressedImage::ConstPtr& ori_img3,
const sensor_msgs::CompressedImage::ConstPtr& ori_img4)
{
// 指针转为msg
sensor_msgs::PointCloud2 syn_pointcloud = *ori_pointcloud;
sensor_msgs::CompressedImage syn_img1 = *ori_img1;
sensor_msgs::CompressedImage syn_img2 = *ori_img2;
sensor_msgs::CompressedImage syn_img3 = *ori_img3;
sensor_msgs::CompressedImage syn_img4 = *ori_img4;
// 打印结果
cout << "syn velodyne points‘ timestamp : " << syn_pointcloud.header.stamp << endl;
cout << "syn Img1‘s timestamp : " << syn_img1.header.stamp << endl;
cout << "syn Img2‘s timestamp : " << syn_img2.header.stamp << endl;
cout << "syn Img3‘s timestamp : " << syn_img3.header.stamp << endl;
cout << "syn Img4‘s timestamp : " << syn_img4.header.stamp << endl;
// 发送话题
Img_info_pub1.publish(syn_img1);
Img_info_pub2.publish(syn_img2);
Img_info_pub3.publish(syn_img3);
Img_info_pub4.publish(syn_img4);
pcl::PointCloud<pcl::PointXYZI>* cloud = new pcl::PointCloud<pcl::PointXYZI>;
pcl::fromROSMsg(*ori_pointcloud, *cloud);
std::vector<int> mapping;
pcl::removeNaNFromPointCloud(*cloud, *cloud, mapping);
sensor_msgs::PointCloud2 out_pointcloud;
pcl::toROSMsg(*cloud, out_pointcloud);
PC_info_pub.publish(out_pointcloud);
}
int main(int argc, char** argv)
{
// 初始化节点
ros::init(argc,argv,"img");
ros::init(argc,argv,"pointcloud");
ros::init(argc, argv, "msg_synchronizer");
ros::NodeHandle nh;
// 初始化发布话题
Img_info_pub1 = nh.advertise<sensor_msgs::CompressedImage>("/compressedimg1",10);
Img_info_pub2 = nh.advertise<sensor_msgs::CompressedImage>("/compressedimg2",10);
Img_info_pub3 = nh.advertise<sensor_msgs::CompressedImage>("/compressedimg3",10);
Img_info_pub4 = nh.advertise<sensor_msgs::CompressedImage>("/compressedimg4",10);
PC_info_pub = nh.advertise<sensor_msgs::PointCloud2>("/pointcloud",10);
// 初始化消息订阅者
message_filters::Subscriber<CompressedImage> camera_sub1(nh, "/hik_cam_node_1/hik_camera/compressed", 1);
message_filters::Subscriber<CompressedImage> camera_sub2(nh, "/hik_cam_node_2/hik_camera/compressed", 1);
message_filters::Subscriber<CompressedImage> camera_sub3(nh, "/hik_cam_node_3/hik_camera/compressed", 1);
message_filters::Subscriber<CompressedImage> camera_sub4(nh, "/hik_cam_node_4/hik_camera/compressed", 1);
message_filters::Subscriber<PointCloud2> velodyne_sub(nh, "/rslidar_points", 1);
// 初始化同步消息规则
typedef sync_policies::ApproximateTime<PointCloud2, CompressedImage, CompressedImage, CompressedImage, CompressedImage> MySyncPolicy;
// 消息同步与回调
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), velodyne_sub, camera_sub1, camera_sub2, camera_sub3, camera_sub4); //queue size=10
sync.registerCallback(boost::bind(&callback, _1, _2, _3, _4, _5));
ros::spin();
return 0;
}六 优化
最后我把所有要启动的节点都写到了一个package里去了,省的开特别多的终端。同时rosbag play我也写到了这个package的另一个launch文件里去了,具体请看README.md

















 2891
2891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









