







1 激光雷达与电脑连接

2 工控机与激光雷达通信
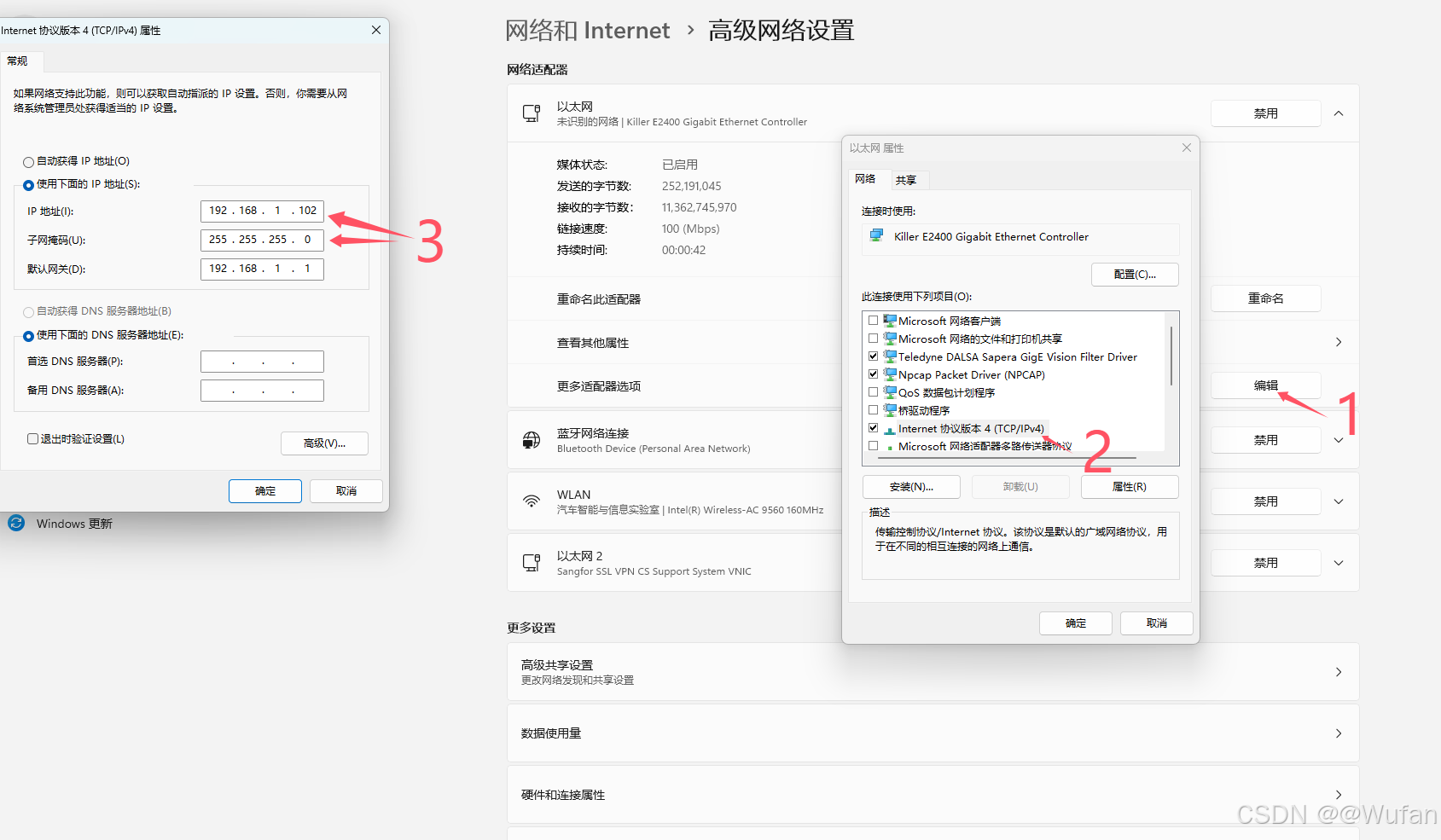
速腾聚创的LiDAR出场默认网络参数配置表如下:
| 设备 | IP地址 | 端口 |
|---|---|---|
| RS-LiDAR-32 | 192.168.1.200 | 6699 |
| 计算机 | 192.168.1.102 | 7788 |
(1)修改电脑IP V4地址
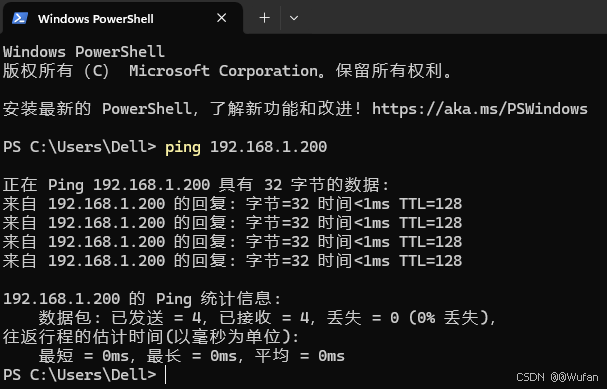
(2) 确定激光雷达和计算机是否成功通信,ping 192.168.1.200。如图所示:
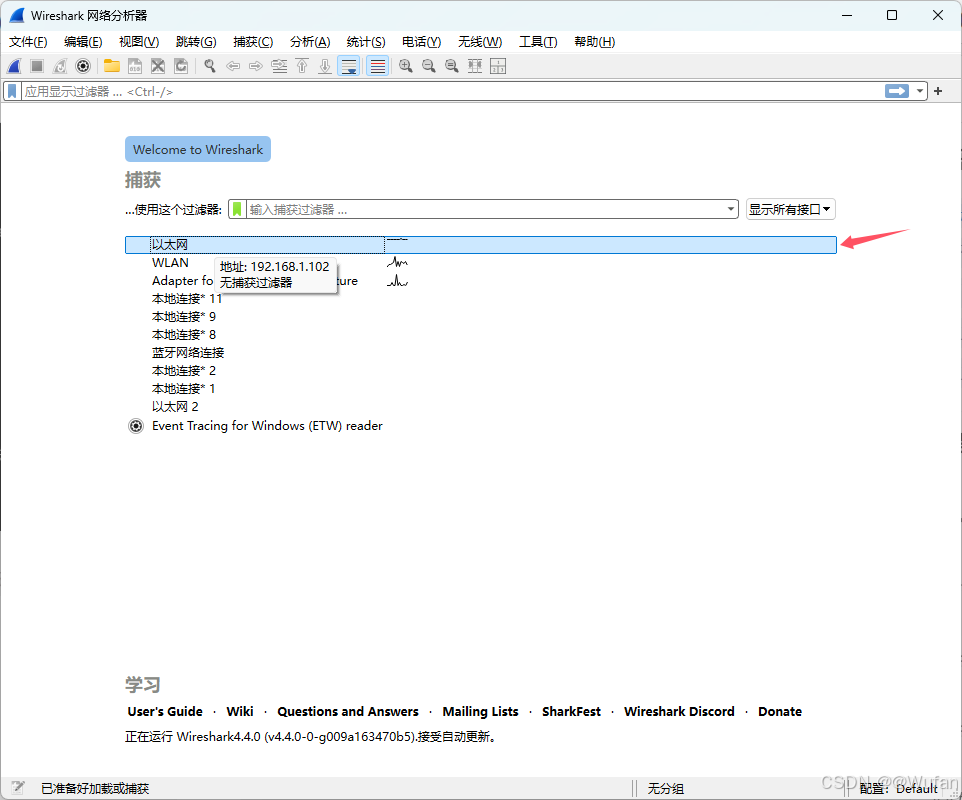
(3)使用Wireshark看通信,及端口(可选)
选择激光雷达连接的工控机的网口:
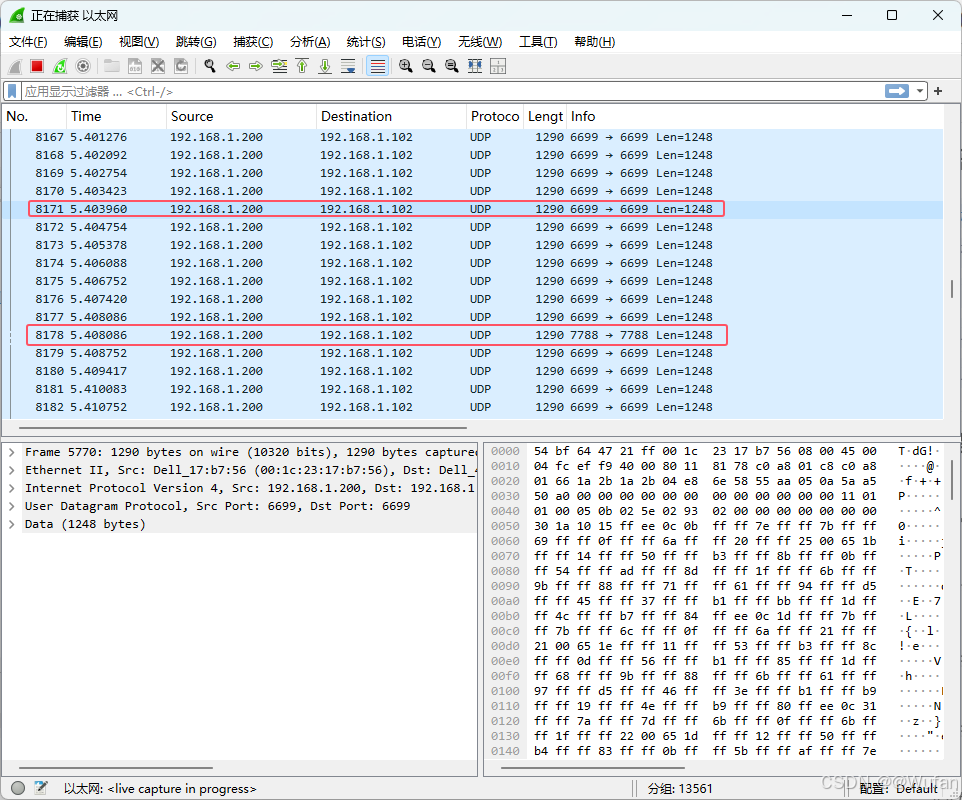
查看:
3 RSView 下载
如果购买激光雷达时提供了软件,则使用提供的软件。否则,进入以下链接填好信息即可下载。
下载连接:https://www.robosense.cn/resources-81

注:下载好的软件的路径中不能包含中文,否则会产生错误。
4 数据采集与可视化
打开RSView,点击file->Open->Sensor Stream。
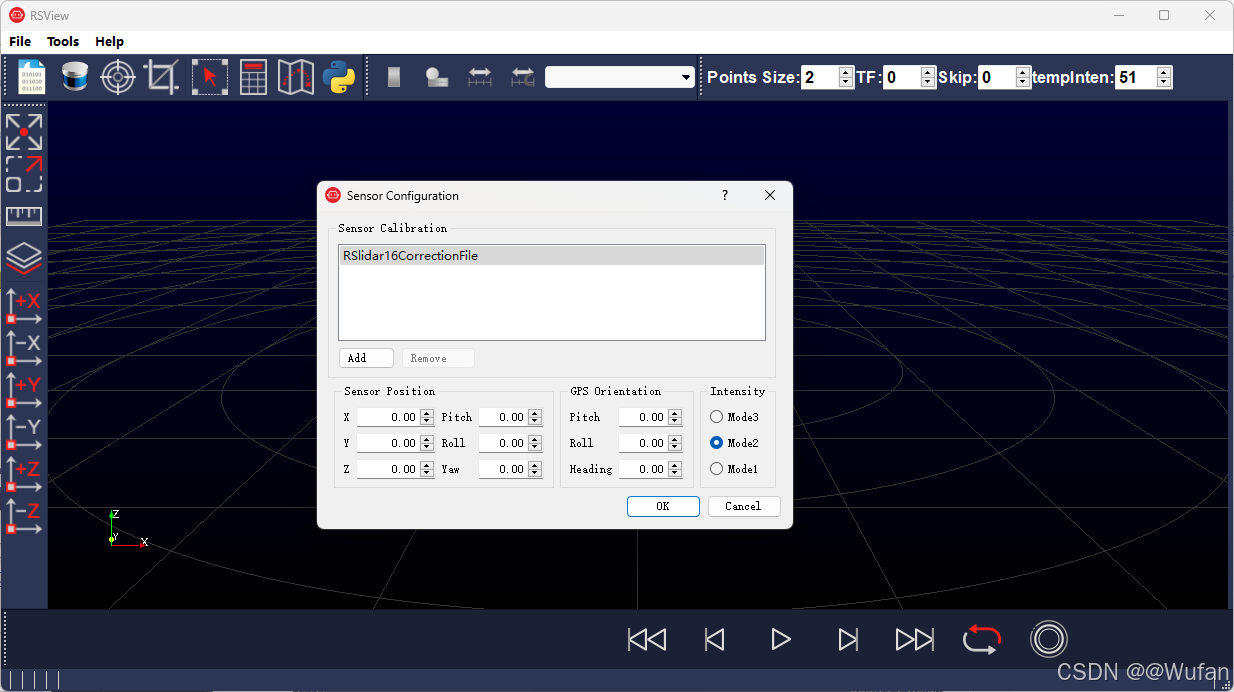
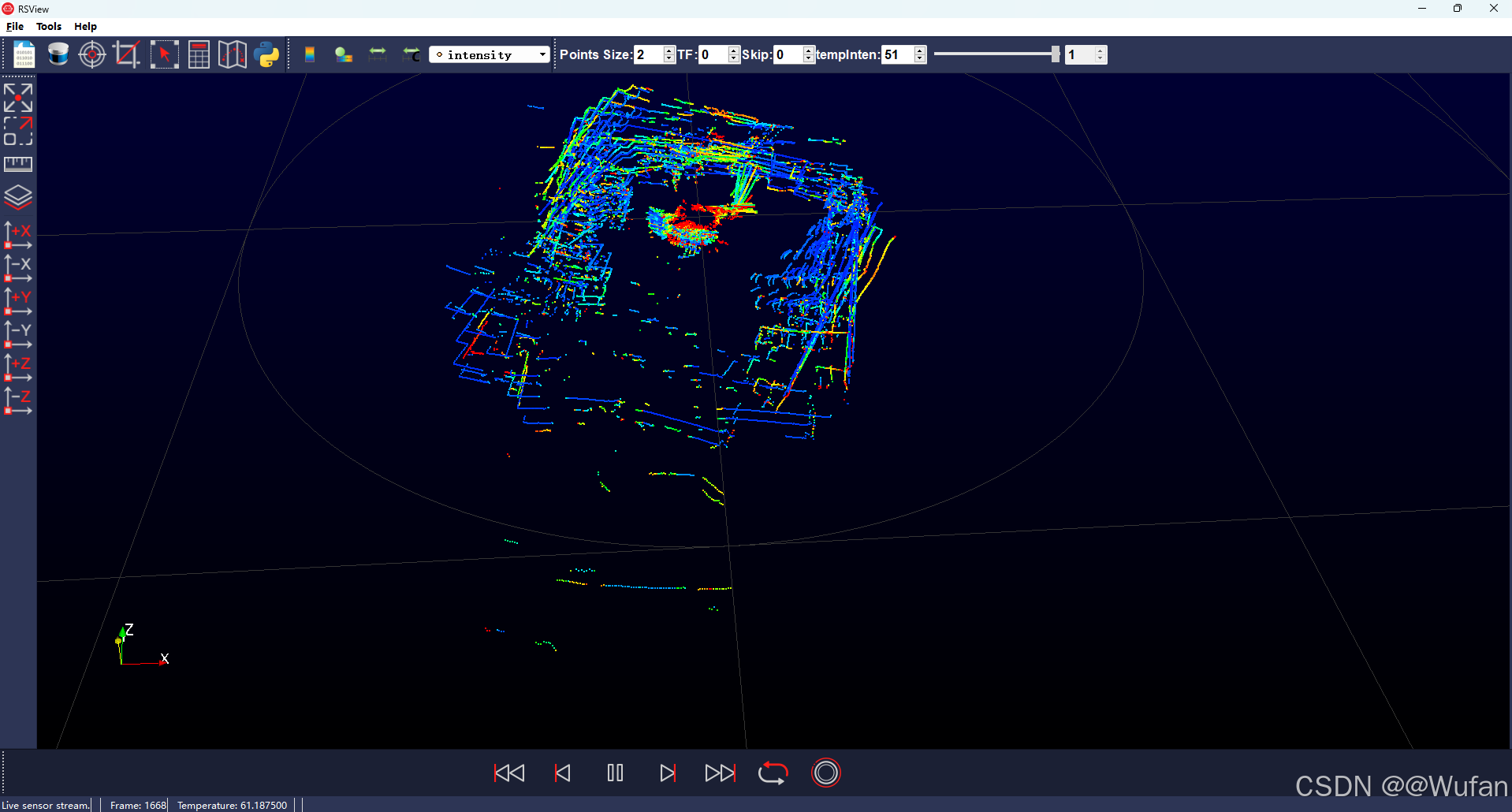
点击OK,结果如下图示:

















 3416
3416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









