









求解相机的姿态变化有许多的方法,从视觉的角度出发是很重要的一种,这里我总结了目前主流的基于CV的求解相机姿态变化的方法。基于视觉的方法,一般思路为从两个姿态的图像上选取匹配点,根据数据的不同,对应用不同的方法计算两两匹配点的R|T,也即外参,而这个R|T也就是相机两个姿态的变换关系。这里的的方法大体分为这么三类,2d到2d的匹配点、2d到3d的匹配点、3d到3d的匹配点。
- 二维到二维的匹配
- Homography(单应矩阵)
- Fundamental(基础矩阵)
- Essential(本质矩阵)
- 二维到三维的匹配
- PnP
- 三维到三维的匹配
- ICP
单应矩阵
基于单应矩阵求解,要求匹配点共面且最少四对。根据匹配点求解两两平面的单应性变换关系,即单应矩阵H,然后分解单应矩阵(分解方法稍后细说)即可得到R|T。
//-- 计算单应矩阵
Mat homography_matrix;
homography_matrix = findHomography ( lastPoints, nextPoints, RANSAC, 3 );
cout<<"homography_matrix is "<<endl<<homography_matrix<<endl;这里使用OpenCV的findHomography求解单应矩阵,其中lastPoints和nextPoints分别为前后两帧一一对应的匹配点。
//-- 分解单应矩阵
vector<Mat> r, t, n;
double intrinsic[9] = { 525.0, 0, 319.5,
0, 525.0, 235.5,
0, 0, 1}; //Xtion内参
Mat mIntrinsic(3, 3, CV_64FC1, intrinsic); //相机内参
decomposeHomographyMat(homography_matrix, K, r, t, n);
cout << "========Homography========" << endl;
for(int i=0; i<r.size(); ++i) {
cout << "======== " << i << " ========" << endl;
cout << "rotation" << i << " = " << endl;
cout << r.at(i) << endl;
cout << "translation" << i << " = " << endl;
cout << t.at(i) << endl;
}使用OpenCV3的decomposeHomographyMat函数分解单应矩阵,这里需要注意,只有OpenCV3才有这个方法,且需要输入相机内参。因为分解后会有四组不确定的值,输入的时候要输入std::vector。这里稍微说一下,四组不确定的值,主要是指针孔模型,物体在相机后面,和相机前面在模型上是等价的,所以,这里两个相机姿态,每个都有前后两种情况,组合就是四组R|T。根据物体平面法向量和物体深度应该可以刷掉两个,剩下两个的方法我还没有想到。
本质矩阵和基础矩阵
//-- 计算基础矩阵
Mat fundamental_matrix;
fundamental_matrix = findFundamentalMat ( lastPoints, nextPoints, CV_FM_8POINT );
cout<<"fundamental_matrix is "<<endl<< fundamental_matrix<<endl;
//-- 计算本质矩阵
Point2d principal_point ( 325.1, 249.7 ); //相机光心, TUM dataset标定值
double focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat ( lastPoints, nextPoints, focal_length, principal_point );
cout<<"essential_matrix is "<<endl<< essential_matrix<<endl;
//-- 从本质矩阵中恢复旋转和平移信息.
cv::recoverPose ( essential_matrix, lastPoints, nextPoints, R, t, focal_length, principal_point );
cout<<"R is "<<endl<<R<<endl;
cout<<"t is "<<endl<<t<<endl;
本质矩阵和基础矩阵不需要共面的特征点,但是有一个不足,其不能像单应矩阵一样应对pure rotation的姿态变化。因为这两个矩阵是从对极约束的关系中推导出来的,而对极约束在pure rotation的姿态变化关系中,是不成立的。这一点需要谨记,这也是单应矩阵最大的优点。
二维到三维PnP
//-- PnP
Mat R_PnP, T_PnP, r_PnP;
solvePnP(pts1, nextPoints, mIntrinsic, Mat(), R_PnP, T_PnP);
cv::Rodrigues ( R_PnP, r_PnP ); // r为旋转向量形式,用Rodrigues公式转换为矩阵pts1为目标点在第一个相机姿态的三维坐标,nextPoints为对应的目标点在第二个相机姿态中像平面的投影点。mIntrinsic为内参矩阵。输出为旋转向量,需要用罗德里格斯公式转换成旋转矩阵。对于超过三个点对的情况,可以用solvePnPRansac实现更为精确的求解。
三维到三维ICP
三维的一般为求解ICP的方法,有SVD求解,和非线性优化求解。
Point3f p1, p2; // center of mass
int N = lastPoints.size();
for ( int i=0; i<N; i++ )
{
p1 += lastPoints[i];
p2 += nextPoints[i];
}
p1 = Point3f( Vec3f(p1) / N);
p2 = Point3f( Vec3f(p2) / N);
vector<Point3f> q1 ( N ), q2 ( N ); // remove the center
for ( int i=0; i<N; i++ )
{
q1[i] = lastPoints[i] - p1;
q2[i] = nextPoints[i] - p2;
}
// compute q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for ( int i=0; i<N; i++ )
{
W += Eigen::Vector3d ( q1[i].x, q1[i].y, q1[i].z ) * Eigen::Vector3d ( q2[i].x, q2[i].y, q2[i].z ).transpose();
}
// cout<<"W="<<W<<endl;
// SVD on W
Eigen::JacobiSVD<Eigen::Matrix3d> svd ( W, Eigen::ComputeFullU|Eigen::ComputeFullV );
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
// cout<<"U="<<U<<endl;
// cout<<"V="<<V<<endl;
Eigen::Matrix3d R_ = U* ( V.transpose() );
Eigen::Vector3d t_ = Eigen::Vector3d ( p1.x, p1.y, p1.z ) - R_ * Eigen::Vector3d ( p2.x, p2.y, p2.z );
// convert to cv::Mat
R = ( Mat_<double> ( 3,3 ) <<
R_ ( 0,0 ), R_ ( 0,1 ), R_ ( 0,2 ),
R_ ( 1,0 ), R_ ( 1,1 ), R_ ( 1,2 ),
R_ ( 2,0 ), R_ ( 2,1 ), R_ ( 2,2 )
);
T = ( Mat_<double> ( 3,1 ) << t_ ( 0,0 ), t_ ( 1,0 ), t_ ( 2,0 ) );这里参考的是高博的《视觉SLAM十四讲》参考代码
旋转矩阵分解成欧拉角
/**
* @brief getAnglesformR
* @param rotation 输入旋转矩阵
* @return 返回角度
*/
bool getAnglesformR(Mat rotation, double &angleX, double &angleY, double &angleZ)
{
// theta_{x} = atan2(r_{32}, r_{33})
angleX = std::atan2(rotation.at<double>(2,1), rotation.at<double>(2, 2));
// theta_{y} = atan2(-r_{31}, sqrt{r_{32}^2 + r_{33}^2})
double tmp0 = rotation.at<double>(2,0);
double tmp1 = rotation.at<double>(2, 1) * rotation.at<double>(2, 1);
double tmp2 = rotation.at<double>(2, 2) * rotation.at<double>(2, 2);
angleY = std::atan2(-tmp0, sqrt(tmp1 + tmp2));
// theta_{z} = atan2(r_{21}, r_{11})
angleZ = std::atan2(rotation.at<double>(1,0), rotation.at<double>(0, 0));
angleX *= (180/CV_PI);
angleY *= (180/CV_PI);
angleZ *= (180/CV_PI);
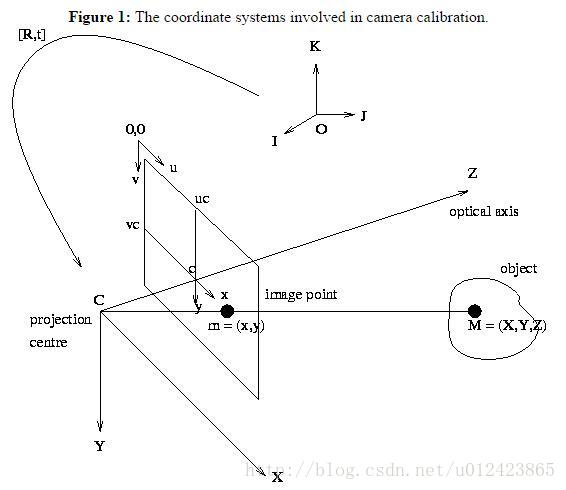
}相机坐标系示意图
关于分解单应矩阵的方法,这里还有一个另一种可以参考泡泡机器人分享的ORB-SLAM2源码分析,单应矩阵分解并选取最优单应矩阵。
分解H矩阵代码
选最优代码
PS
1. 觉得本文有帮助的可以左上角点赞,或者留言互动。















 2142
2142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









