







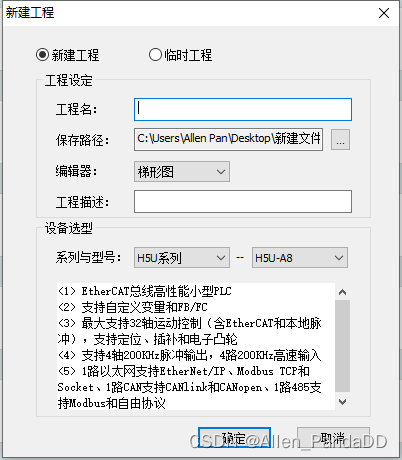
新建工程
新建一个H5U工程,不使用临时工程
系列选择H5U即可
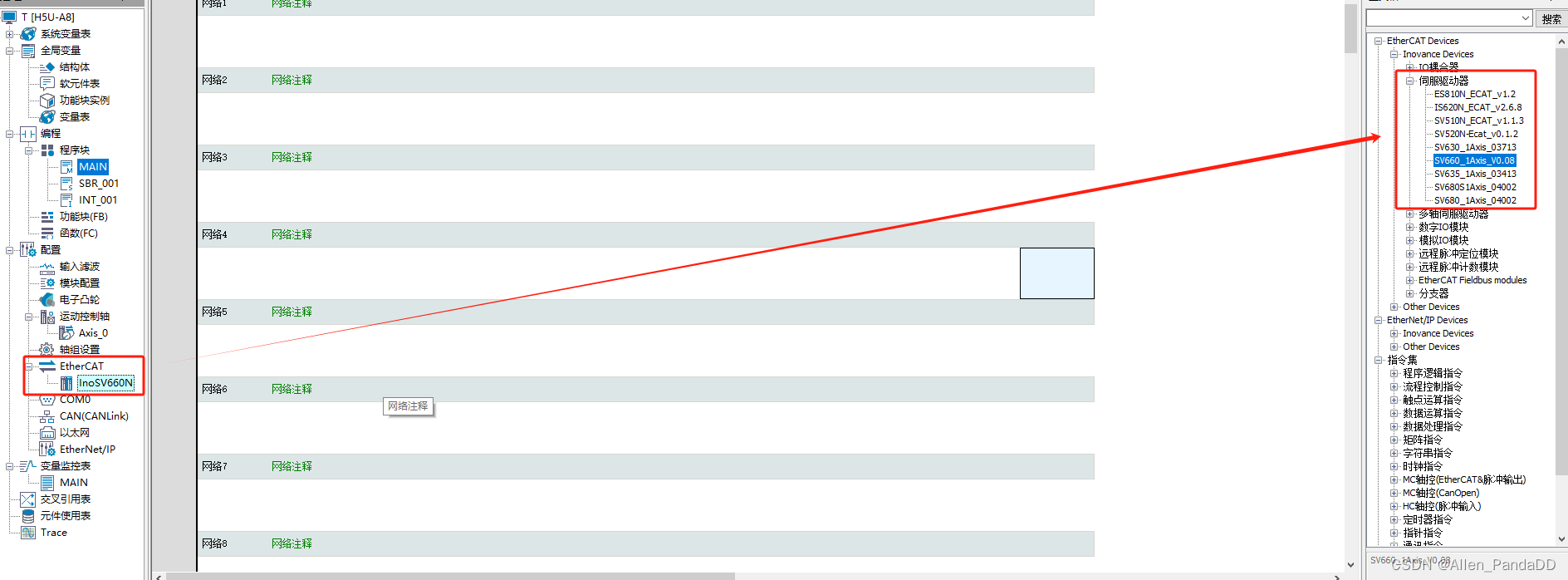
添加EtherCAT组态
这里在EC总线中添加了一个汇川660的伺服
驱动参数使用默认
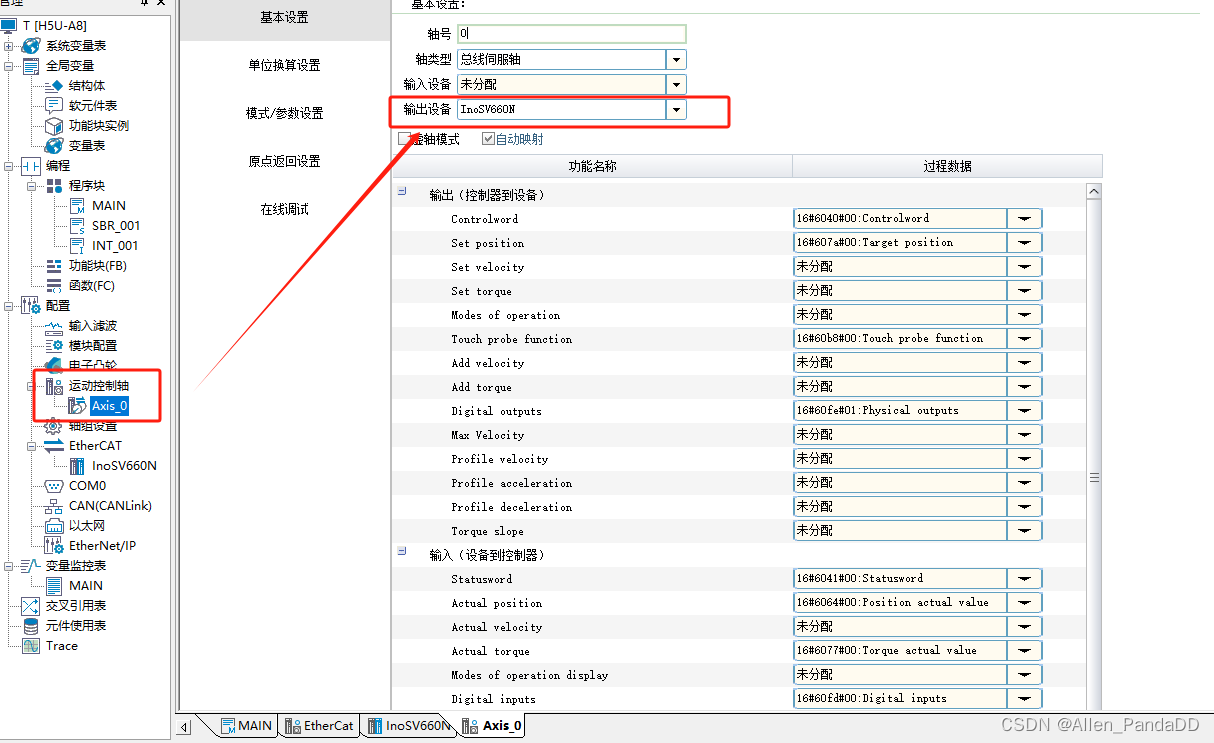
添加运动控制轴
新建一个轴Axis_0
将新建的轴和EC组态的660驱动关联起来
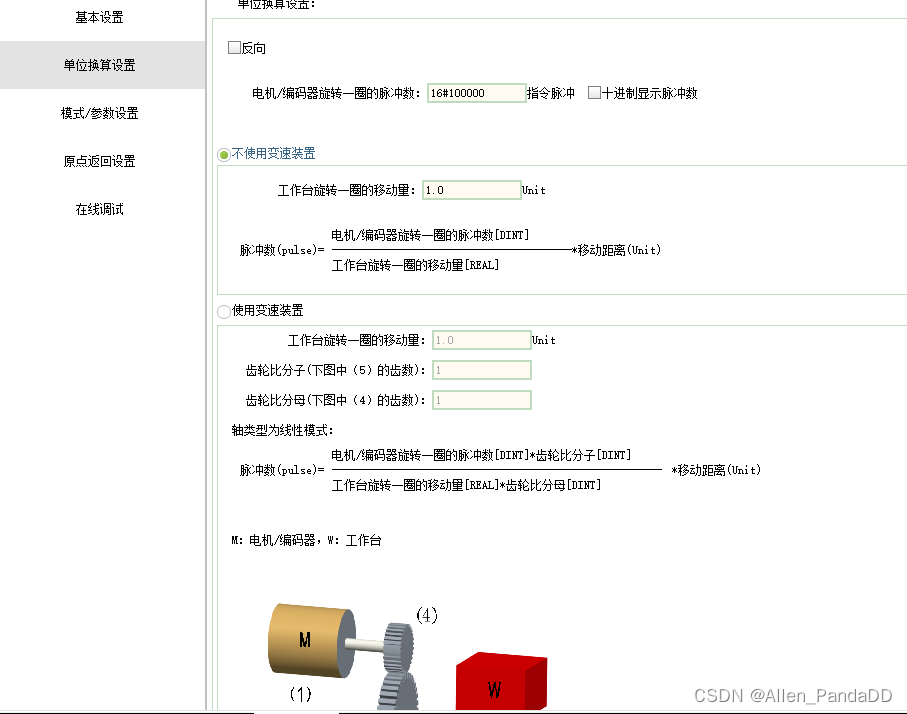
单位换算按照实际硬件情况设置
模式/参数设置按照实际硬件情况设置
原点返回设置按照实际硬件情况设置
由于这里是通过仿真来测试,所以都使用默认设置
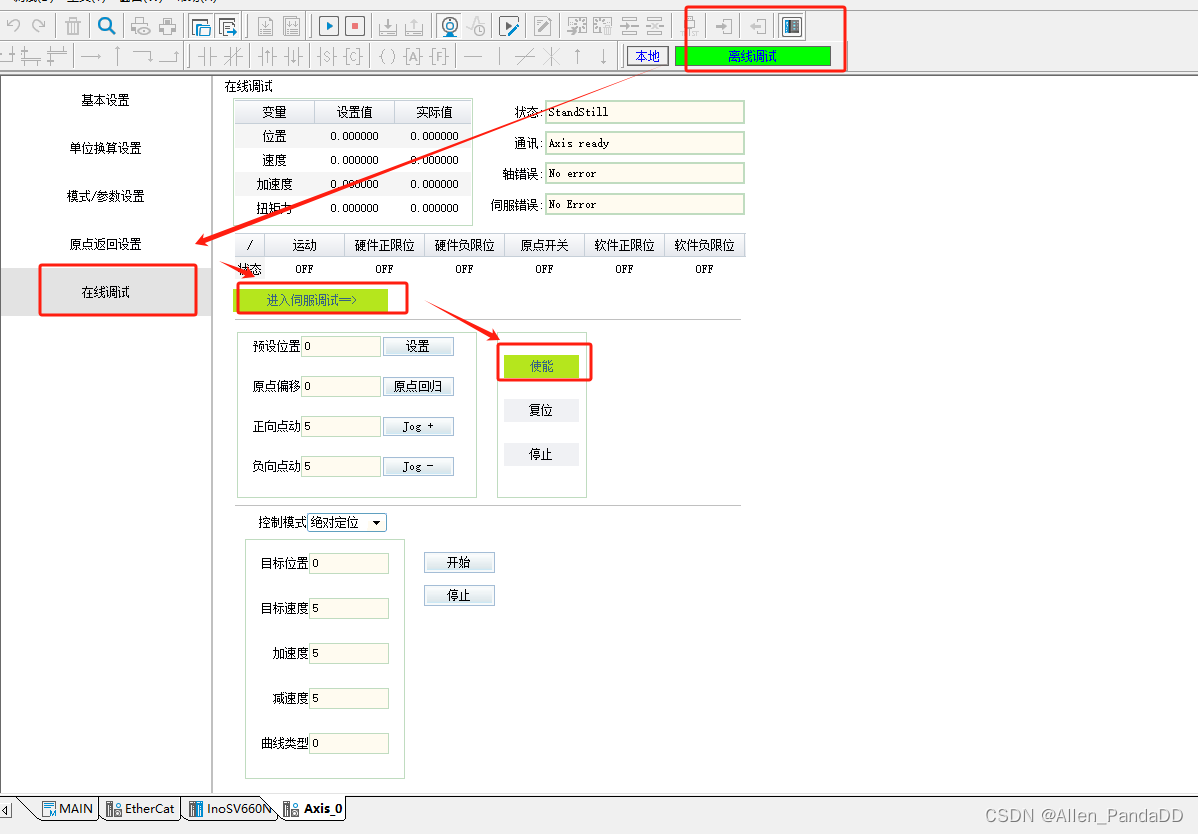
仿真测试
打开离线仿真
进入在线调试
进入伺服调试
伺服使能
可以测试伺服点动,回原点,绝对定位等
实际硬件测试的时候,只要连上总线,然后PLC进行在线操作即可。
当需要测试一个机构或者测试电机运行状态的时候,打开软件就能使用,非常方便。
也可去看一下这个测试视频
链接: 007-汇川H5U小型PLC不用写程序测试EC总线电机
分享创作不易,请多多支持,点赞、收藏、关注!
Ending~



















 3100
3100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











