







多摄像头应用越来越流行;它们对于实现自主机器人、智能视频分析( IVA )和 AR / VR 应用至关重要。无论具体的用例如何,都必须始终执行一些常见任务:
- 俘虏
- 预处理
- 编码
- 陈列
在许多情况下,您还希望在摄像头流上部署 DNN ,并在检测上运行自定义逻辑。图 1 显示了应用程序的一般流程。
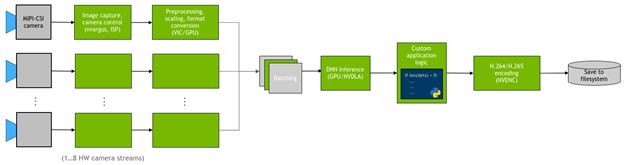
图 1 。本项目实施的管道流程
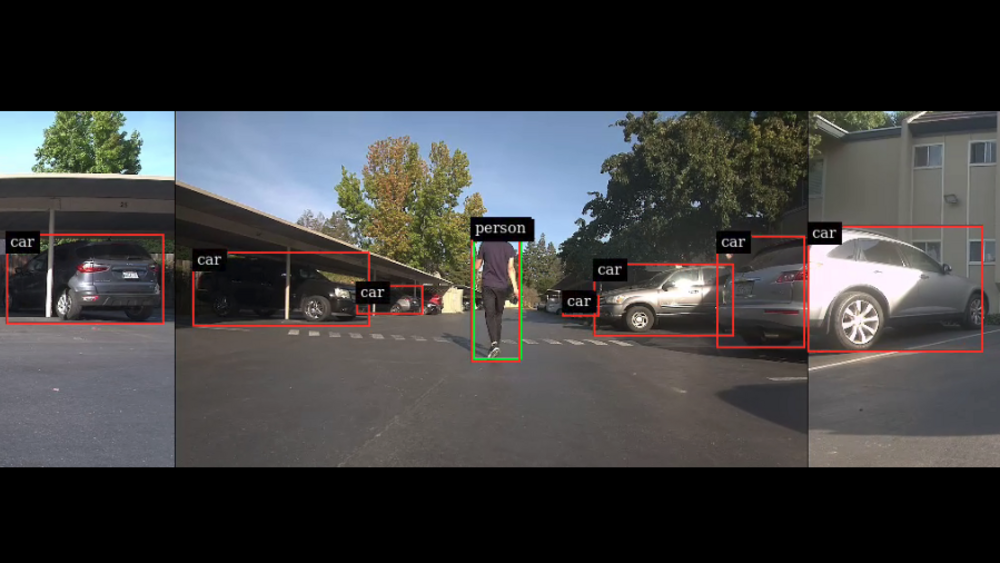
在本文中,我将展示如何在 NVIDIA Jetson 平台上高效地实现这些常见任务。具体来说,我介绍了 jetmulticam ,一个易于使用的 Python 软件包,用于创建多摄像头管道。我在一个带有环绕摄像头系统的机器人上演示了一个特定的用例。最后,我添加了基于 DNN 对象检测的自定义逻辑(人员跟踪),以获得以下视频中显示的结果:
演示显示了 3 个独立摄像头,视野约为 270 °。红色框对应 DashCamNet 检测,绿色框对应 PeopleNet 。 PeopleNet 检测用于执行人员跟踪逻辑 。
多摄像头硬件
选择相机时要考虑的参数有很多:分辨率、帧速率、光学、全局/滚动快门、界面、像素大小等。有关 NVIDIA 合作伙伴提供的兼容摄像头的更多信息,请参阅 comprehensive list 。
在这个特定的多摄像头设置中,可以使用以下硬件:
- NVIDIA Jetson Xavier NX 单元
- Leopard Imaging 提供的支持 GMSL2 的 carrier board
- Leopard Imaging 的 3 × IMX185 GMSL2 cameras
IMX185 摄像头的视野约为 90 °。如图 2 所示,以 270 °的总视场相互
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2632
2632

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









