






从技术角度观察行业发展,努力跟上时代的步伐。公众号致力于点云处理,SLAM,三维视觉,具身智能,自动驾驶等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。文章未申请原创,未经过本人允许请勿转载,有意转载联系微信920177957。
摘要
当波士顿动力的Atlas机器人完成高难度后空翻时,当特斯拉Optimus在工厂里稳健行走时,这些突破背后都离不开一项核心技术——基于强化学习的步态训练。本文将带您深入探索人形机器人如何通过关节传感器与IMU数据,在强化学习的指导下逐步掌握行走技能的全过程。

图片来自网络
强化学习:机器人运动控制的新范式
基本原理
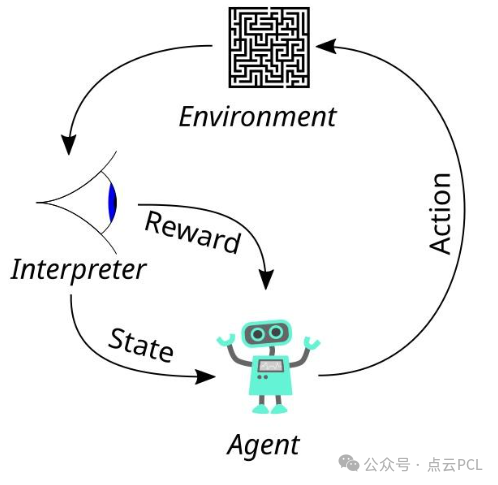
强化学习(Reinforcement Learning)通过"试错-反馈"的机制,让智能体在与环境交互中自主优化决策策略。在人形机器人场景中,这个"智能体"就是机器人本体,环境则是它需要应对的各种地形和物理条件。想象一个蹒跚学步的婴儿,每一次跌倒都会调整肌肉发力的方式——这正是强化学习在数字世界的映射。
图片来自网络
关键三要素
状态空间(State Space):包含关节角度、角速度、IMU测量的躯干姿态(欧拉角/四元数)、加速度等上百个维度数据,相当于机器人的"神经系统"
动作空间(Action Space):通常对应各个关节电机的目标位置或力矩输出,如同控制人体肌肉的神经信号
奖励函数(Reward Function):工程师设计的"虚拟教练",通过数值反馈引导学习方向。比如当机器人向前迈步时给予正反馈,晃动过大时扣除分数
图片来自网络
步态训练的四大核心技术
状态空间设计
机器人每秒钟需要处理:
多个关节编码器数据(位置+速度),精确到0.1度级。
IMU提供的6轴数据(3轴加速度+3轴角速度),采样频率高达1000Hz。
足底力传感器信息(接触状态),判断是否踏空或打滑。
历史状态序列(通常包含过去3-5帧数据),用于捕捉运动趋势。
案例:加州大学伯克利分校的工程学院长期处于全球机器人研究的前沿,其团队在强化学习与运动控制领域积累了丰富经验。该研究可能隶属于其机器人学习实验室(Robot Learning Lab)或仿生机器人实验室(Biomimetic Robotics Lab),旨在解决机器人动态地形适应中的稳定性难题。斜坡行走对机器人而言是典型的高难度场景,需处理重力分力、足底摩擦力突变等复杂物理条件。传统控制方法依赖精确建模,但实际环境的不确定性(如坡度变化、地面材质差异)会导致模型失效。伯克利团队通过引入历史状态数据,可能增强了机器人对运动趋势的预判能力。研究通过增加0.5秒的历史状态可能包含关节角度时序变化、IMU姿态序列、足底接触力波动等数据。这些信息能帮助强化学习模型捕捉运动惯性、识别坡度变化模式,从而优化步态规划。并通过通过MuJoCo物理仿真引擎构建随机斜坡环境,对比有无历史状态输入的控制效果。47%的成功率提升表明历史信息显著改善了机器人对动态扰动的适应能力。
图片来自网络
奖励函数
奖励函数如同驾驶教练的评分表,典型设计包含:
速度奖励:鼓励稳定前进,但需防止"冲刺导致跌倒"的短视行为。
平衡奖励:通过躯干倾斜角度计算,维持重心投影在支撑多边形内。
能耗惩罚:抑制关节电机剧烈抖动,延长电池续航
安全惩罚:检测膝关节过伸等危险动作。
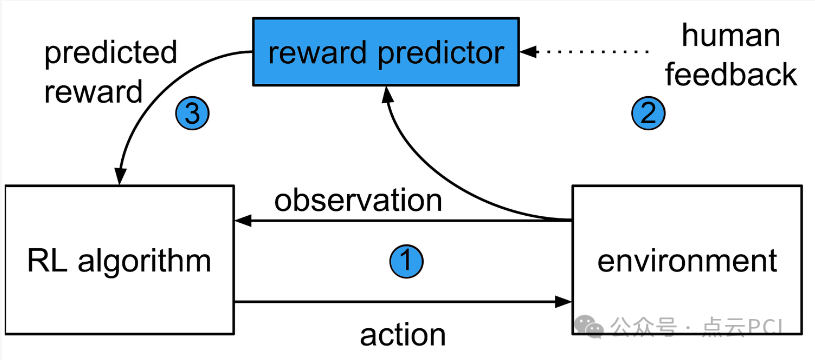
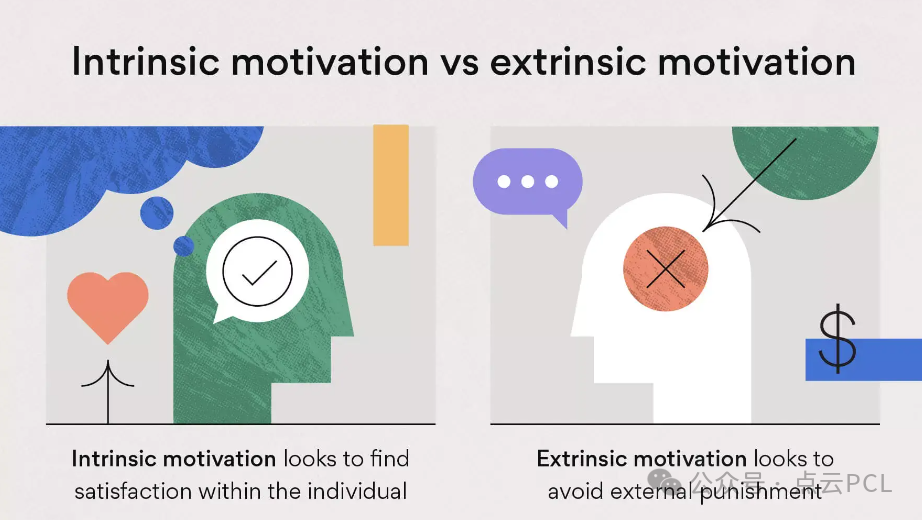
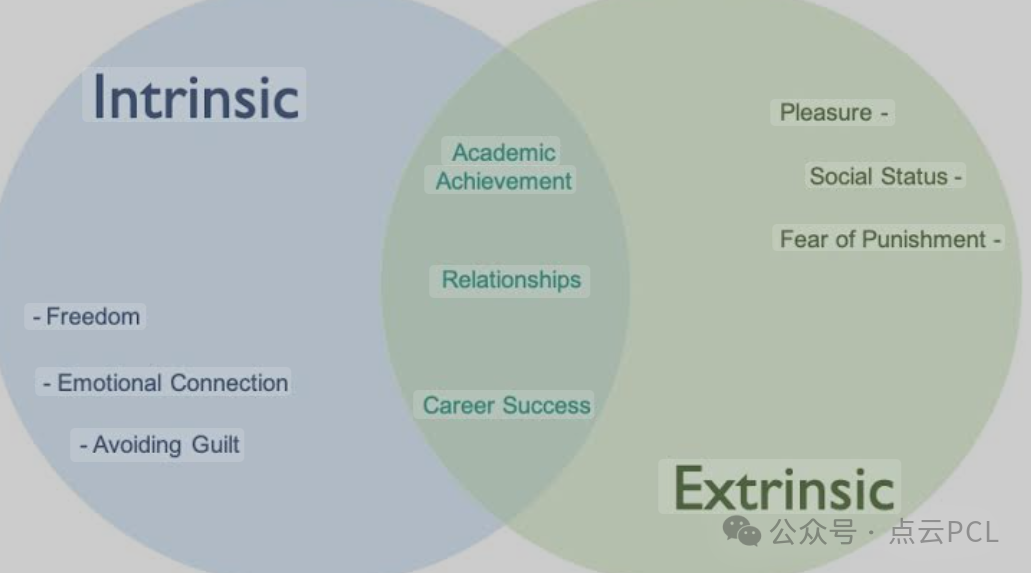
案例:东京大学工学部电子情报工学科的山崎俊彦教授团队长期专注于多模态数据与强化学习的融合应用,其研究领域涵盖计算机视觉、运动控制及人机交互等方向。在机器人步态训练中,传统强化学习常面临探索效率低和奖励稀疏的问题——机器人仅通过预设的奖励函数(如前进速度、平衡度)学习,容易陷入局部最优或缺乏自主创新能力。为此,团队提出在奖励函数中引入内在激励(Intrinsic Motivation),即"好奇心奖励",以激发机器人主动探索未知步态模式。
图片来自网络
训练环境构建
现代训练方案采用:
物理仿真引擎:MuJoCo模拟肌肉特性,PyBullet构建复杂地形,Isaac Gym实现大规模并行训练。
随机化参数:地面摩擦系数(0.3-1.2)、推力的幅值(0-30N)和方向,模拟现实世界的不确定性。
课程学习:从婴儿学步到健步如飞的分阶段训练,先学平地行走再挑战碎石路面。
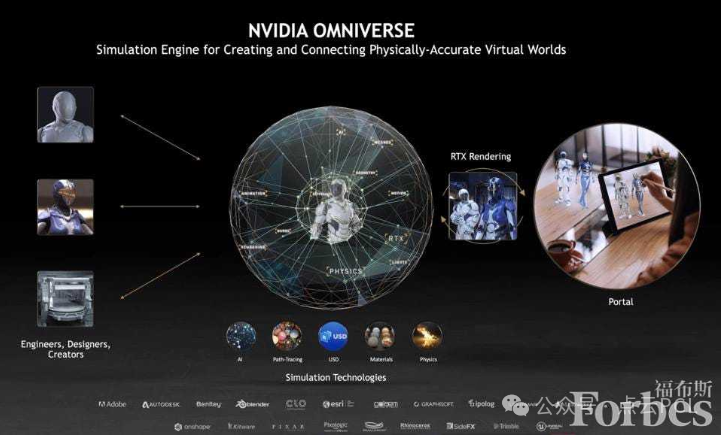
案例:英伟达Omniverse平台通过其物理AI操作系统与Cosmos世界基础模型的结合,实现了大规模地形生成的突破性能力,为机器人训练提供了高度多样化的虚拟环境。Omniverse平台依托OpenUSD框架和Cosmos世界基础模型,构建了一个动态的物理仿真生态系统:
多模态输入生成:通过文本、图像、视频等输入形式,结合物理规律(如重力、摩擦系数、材质属性),实时生成包含山地、沙漠、冰面、城市街道等10万种地形的虚拟环境。
参数随机化引擎:开发者可自定义地形参数(如坡度范围0°-45°、摩擦系数0.3-1.2),系统自动生成符合物理规则的地形变体,支持动态调整天气(雨雪、沙尘暴)和光照条件。
合成数据增强:利用Cosmos Transfer模型,将真实地形数据(如卫星图像、激光雷达扫描)转换为高保真虚拟场景,并通过风格迁移技术生成不同材质的地表(如沥青、草地、冰面)。
图片来自网络
算法架构演进
早期方案:PPO算法通过"小步快跑"策略稳定更新参数。
当前主流:SAC算法结合最大熵原理,在探索与利用间取得平衡。
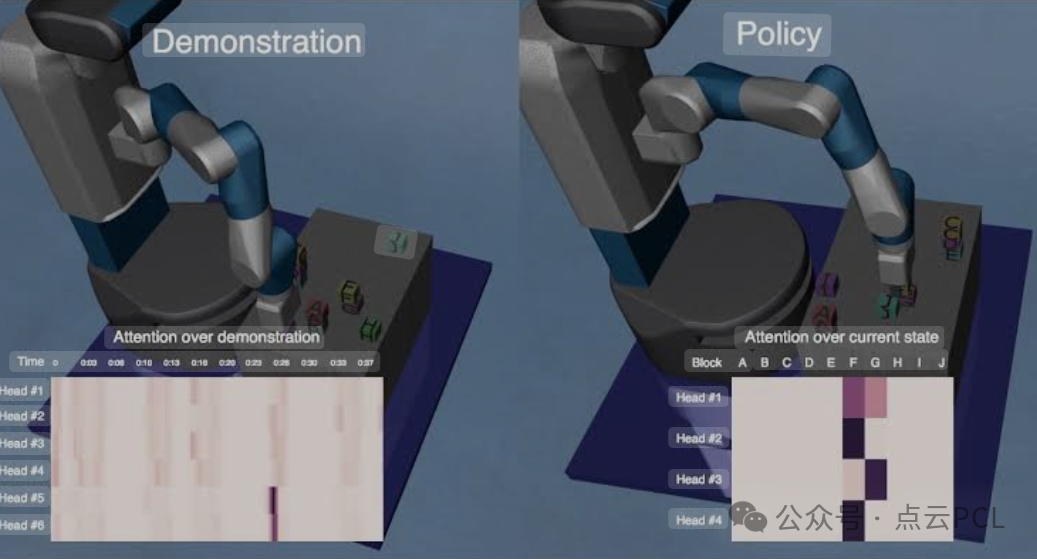
前沿突破:MIT团队采用Transformer架构,使机器人能预测未来5步的运动轨迹。
IMU与关节传感器
IMU的三大关键作用
姿态感知:通过卡尔曼滤波融合数据,实时计算躯干的三维姿态。
冲击检测:当加速度计测得>3g的冲击时,触发紧急保护程序。
运动预测:结合陀螺仪数据预估0.2秒后的身体状态。
案例:人形机器人模仿人类"摆臂平衡"的行为,本质上是IMU(惯性测量单元)数据与强化学习算法协同作用的结果。这种看似自然的摆动动作,实际上是机器人通过实时感知姿态变化、主动调整运动策略的智能表现。Optimus的摆臂动作与人类高度相似,其多模态神经网络整合了IMU、摄像头和关节编码器数据。在上下楼梯时,IMU检测到俯仰角变化后,手臂会自然前后摆动以调节重心位置,同时通过强化学习优化摆动幅度与步长的协调性。

图片来自网络
关节传感器的隐藏信息
能耗管理:通过电机电流估算实时功率消耗。
地形感知:关节位置误差反映地面硬度(如踩到沙子时的位置偏差)。
健康监测:持续追踪关节摩擦力变化,提前预警机械故障。
案例:ASIMO搭载的关节传感器与力传感器形成闭环反馈系统,实时优化步态策略:
力矩动态分配:基于关节编码器数据(精度0.1°)和6轴力传感器反馈,动态调整各关节输出力矩,避免过度发力。
步态相位预测:通过历史关节角度序列(0.5秒窗口)预测重心变化趋势,提前规划高效步态周期,减少急停急启的能耗波动。
地面反作用力适配:结合足底力传感器数据识别地面硬度(如水泥地vs地毯),自适应调整关节刚度与步幅,降低打滑时的能量浪费。
图片来自网络
突破性进展与现存挑战
里程碑成果
速度突破:2023年CMU团队实现2.5m/s的奔跑速度(人类慢跑水平),卡内基梅隆大学(CMU)团队通过分层强化学习架构优化了机器人的动态步态。其核心在于将奔跑动作分解为触地相位和腾空相位,分别设计奖励函数:触地阶段:最大化地面反作用力的水平分量以推动前进。腾空阶段:优化腿部摆动轨迹以减少空气阻力,同时,采用可变刚度膝关节驱动,通过仿生肌腱结构在触地瞬间储存能量,并在腾空时释放,提升能量利用效率。
抗扰能力:2024年DeepMind展示单腿站立抗30N冲击的平衡能力,DeepMind在机器人单腿站立时,从侧向施加30N冲击力(约3公斤重物瞬间撞击),持续时间0.2秒。机器人需在0.5秒内恢复平衡,且躯干倾斜角不超过5度。
环境适应:波士顿动力最新算法可在10分钟内适应冰面行走,波士顿动力开发了在线参数辨识算法,能在10分钟内通过滑移数据实时修正动力学模型:1. 前2分钟:检测滑移频率与幅度,估算冰面摩擦系数(0.05-0.1)2. 后8分钟:调整步态策略(如缩短步幅、增加足底接触面积)。
技术瓶颈
数据饥渴:训练Optimus行走需要约3000GPU小时的算力,算力消耗来源:
物理仿真精度:每步仿真需计算10万级粒子交互(如足底与地面的微观接触)。
策略探索空间:28个关节的连续动作空间导致维度爆炸,需数十亿次试错。
安全验证开销:每次策略更新后需在100种随机地形中验证稳定性。
同等复杂度的四足机器人训练仅需500 GPU小时,人形机器人因双足动态平衡需求,数据效率低6倍。
安全困境:95%的探索动作会导致跌倒,需设计智能保护机制。风险来源:探索-利用矛盾:为发现高效步态,算法需尝试高风险动作(如大跨步),硬件极限:电机过热、齿轮磨损导致突发性能下降,增加意外跌倒概率。现有解决方案局限:虚拟安全层限制关节运动范围,但会屏蔽20%的有效策略。仿真预训练,虽减少真实环境跌倒次数,但无法覆盖所有物理不确定性。
知识迁移:仿真环境训练的模型在真实世界表现下降约40%,在仿真中训练出的楼梯攀爬成功率92%,移植到真实机器人后降至53%,主要失效模式为足底打滑与重心误判。
解决方案
混合训练:将真实跌倒数据反哺仿真模型,提升泛化能力。
在真实环境中部署保护性跌倒机制(如气动缓冲装置),记录500组跌倒过程的关节力矩、IMU数据。
通过域适应算法,将真实传感器噪声(如电机振动频谱)注入仿真环境。
在增强后的仿真器中重新训练策略,使模型学习识别跌倒前兆(如躯干角速度突变)。
元学习:让机器人在虚拟环境中预学习多种地形特征,特征提取,使用图神经网络编码地形几何与物理属性(如坡度、摩擦系数),快速适应在新地形上仅需50步交互数据即可生成适配步态(传统方法需5000步)。
触觉增强:为足底添加振动传感器,识别不同材质地面。
总结
当机器人学会在暴雨中稳步前行,在废墟上自主搜救时,这不仅是技术的胜利,更是人类理解智能本质的里程碑。强化学习赋予机器的不仅是行走的能力,更是一种在不确定世界中持续进化的生命力。或许在不远的未来,我们将见证机器人以独有的步态美学,重新定义"行走"的艺术。
相关阅读:2024年度历史文章大汇总
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,具身智能,自动驾驶,以及机器人等相关的领域。
分享与合作:微信“920177957”(备注:姓名+学校/公司+研究方向) 联系邮箱:dianyunpcl@163.com。
为分享的伙伴们点赞吧!



















 1525
1525

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











