







 超级会员免费看
超级会员免费看
 本文探讨了腿式机器人行走控制的关键技术,包括行走周期、行走运动公式、LIPM模型、ZMP理论以及模型预测控制(MPC)。通过控制ZMP、DCM和脚步运动规划,实现机器人在复杂地形上的稳定行走。
本文探讨了腿式机器人行走控制的关键技术,包括行走周期、行走运动公式、LIPM模型、ZMP理论以及模型预测控制(MPC)。通过控制ZMP、DCM和脚步运动规划,实现机器人在复杂地形上的稳定行走。
第六篇:行走控制
1. 引言
腿式机器人在复杂地形中行走的能力使其成为探索、救援和军事等领域的重要研究对象。在本篇博文中,我们将探讨腿式机器人行走周期、行走运动公式、零力矩点(ZMP)和模型预测控制(MPC)等相关理论与实践方法。
2. 行走周期
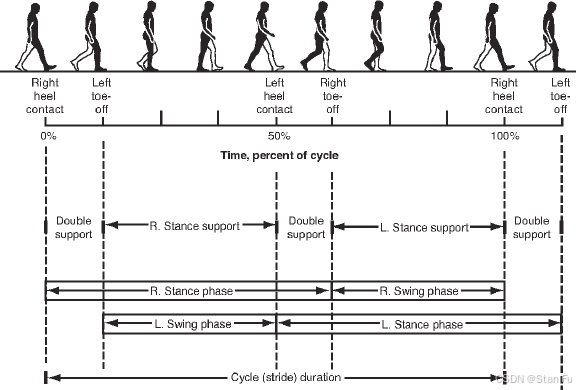
腿式机器人的行走周期可以分为支撑相和摆动相两个主要阶段。在支撑相中,机器人的一只或多只脚与地面接触,支撑整个身体的重量。在摆动相中,抬起的脚移动到下一个支撑点。
-
支撑相:支撑相的主要任务是保持平衡和支持身体重量。该阶段要求机器人能稳定地控制重心,使得零力矩点(ZMP)始终保持在支撑多边形内。
-
摆动相:摆动相的主要任务是将抬起的脚移动到下一个预定的支撑点。这个过程需要考虑行走速度、步幅和避障等因素。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 581
581

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











