







本教程系列全程参考ROS机器人操作系统入门
1.Service
针对计算量大的节点
ROS中的同步通信方式,Node间可以通过request-reply方式通信

NodeB给外界提供一个serice,如果没有请求,NodeB不会执行。
(1)和Topic区别

srv
Service通信的数据格式,定义在*.srv中
(1)例子:人体检测


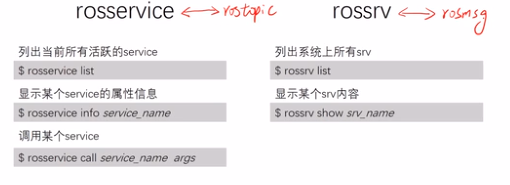
相关命令
2.Parameter Server
存储各种参数的字典,维护:可用命令行、launch文件和node(API)读写
字典:

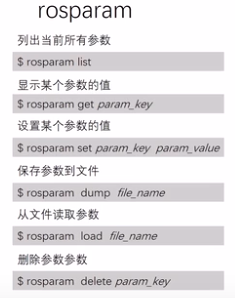
(1)用命令行设置参数
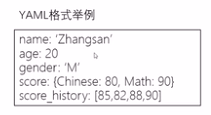
YAML格式举例
(2)launch文件中读写

与参数服务器相关的标签只有两个:param和rosparam,功能相近,但是param一般只设置一个参数,
(3)利用api在源代码中设置















 322
322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









