







本文是根据慕客网上的机器人操作系统入门课程
https://www.icourse163.org/learn/ISCAS-1002580008?tid=1002759011#
所记录的学习过程,大部分内容是对应教材里面的内容,如有侵权行为,联系本人删除文章。
一、工作原理
Service通信是双向的, 它不仅可以发送消 息, 同时还会有反馈。 所以service包括两部分,一部分是请求方( Clinet) , 另一部分是应 答方/服务提供方( Server)。这时请求方( Client) 就会发送一个request, 要等待server处理, 反馈回一个reply, 这样通过类似“请求-应 答”的机制 完成整个服务通信。
这种通信方式的示意图 如下:
Node B是server( 应答方) , 提供了 一个服务的接口 , 叫 做 /Service , 我们 一般都会用string类型 来指定service的名 称, 类似于topic。 Node A向Node B发起了 请求, 经过处理后得到了反馈。

Service是同 步通信方式, 所谓同 步就是说, 此时Node A发布请求后 会在原 地等待reply, 直到Node B处理完了 请求并且完成了 reply, Node A才 会继续执行。 Node A等待过程中 , 是处于阻塞状态的成通信。 这样的通信模型 没有频繁的消 息传递, 没有冲突与 高 系 统资源的占 用 ,只有接受请求才执行服务, 简单而且高效。
二、topic vs service

注意: 远程过程调用 (Remote Procedure Call, RPC),可以简 单通俗的理解为 在一个进程里调用 另 一个进程的函数。
三、操作指令

四、演示操作
1. 首先依然是打开教材的模拟场景 roslaunch robot_sim_demo robot_spawn.launch,运行结果如下图所示:

2. 打开新的终端,输入 rosservice list , 查看当前运行的服务,运行结果如下所示:

3. 随机选择 /gazebo/delete_light 服务, 观察名 称,是删 除光源的操作。
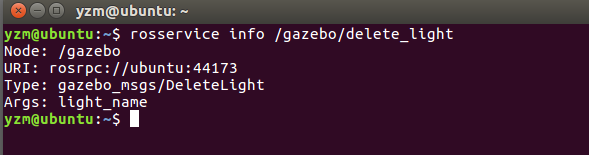
4. 输入 rosservice info /gazebo/delete_light 查看属性信息。 信息如下图所示:
5. 输入 rosservice call /gazebo/delete_light sun ,这里的sun 是参数名 , 是我们模拟场景中的唯一光源太阳 。 操作完成后可以看到场景中 的光线消失,如下图所示:

6. 可以看到 终端的回传信息: success: True和sun successfully deleted。 这就是双向通信的信息反馈, 通知操作已经成功完成。















 2663
2663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









