







 超级会员免费看
超级会员免费看
引言: 如第一篇挑战赛的博客(# CVPR2023挑战赛之-开放车道拓扑信息(OpenLane Topology)的测试【1】)所说,这项任务,实际上是一个复合任务,其评价指标也是语义分割、目标检测加拓扑位置关系三个指标的精准性平均值。本博客就第一名公布的Arxiv方法进行了解读,并对topology relationship 的评价指标进行了说明和测试。
CVPR2023 Openlanev2 挑战赛:第一名方案
1. 方法简介
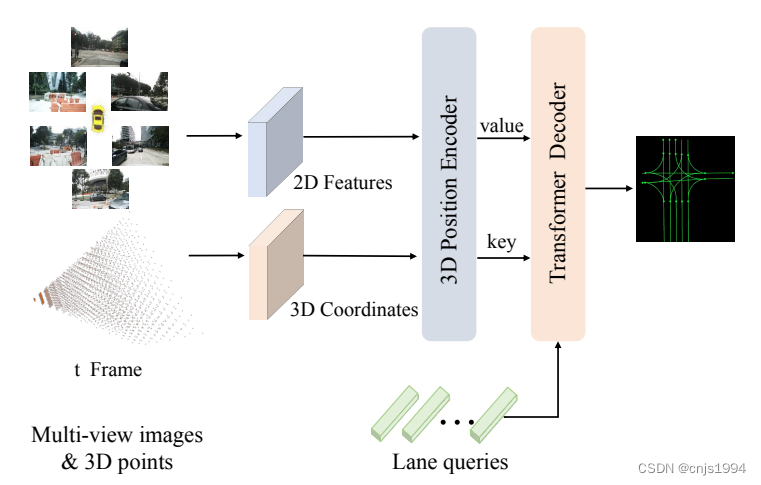
考虑到拓扑推理是基于中心线检测和交通元素检测的,作者开发了一个多阶段的高性能框架。具体地,centerline 由强大的PETRv2检测器检测,并且YOLOv8用于检测交通元素。此外,还设计了一种简单而有效的基于MLP的拓扑预测头,提出的方法在OpenLaneV2测试集上实现了55%的OLS,比第二个解决方案高出8% points。
1.1 任务分解
OpenLane Topology是一项新的感知和重构任务,用于理解自动驾驶中的3D场景结构。给定覆盖整个全景视野的多视图图像,需要分析交通元素和centerline 之间感知实体的关系。它由四个子任务组成,包括centerline (也称为车道)检测、交通要素检测、车道拓扑和车道交通拓扑预测

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1022
1022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











