







1.树莓派安装teamviewer 官网上有 --昨天在在小车上装树莓派,需要远程控制,首先考虑vnc vncvewer和vncserver。需要配置一些东西,貌似也就改两行注释就好,一定要先好好看那些自动生成的说明。然后,还是不行,vnc上的rviz无法打开,不能数据可视化,怀疑是server的原因,没深究,所以,最后安装了teamviewer,这货貌似可以直接内网穿透,然后需要自动生成一串数字和密码,用于登录的数字应该是固定的,密码一开始是随机的,后来可以自己设置成固定的。
http://www.sohu.com/a/148729769_680233(转,有空看.)
可以多机器ros,rviz运行在本地!!
An either case, VNC or forwarding X is probably not the best way to work with rviz remotely. A much better plan would be to follow the directions on NetworkSetupto get your computer connected to the robot’s rosmaster (setting the ROS_MASTER_URI and ROS_IP for both machines is what I do instead of setting up DNS). This way, you can run rviz locally on your computer, only sending ROS data across the network instead of forwarding X or VNC, both of which I found to be quite slow when working with a 3D application like rviz.
A common task is to SSH into the robot’s computer and run RVIZ to get the laser output and other visualization. Running RVIZ directly on the remote computer will not work due to the way RVIZ is implemented. The workaround is to run RVIZ locally. To do this we need to set the local computer to locate the remote MASTER NODE in order to display the right information. README on getting RVIS to work over multiple computers——————————————————A common task is to SSH into the robot’s computer and run RVIZ to get the laser output and other visualization. Running RVIZ directly on the remote computer will not work due to the way RVIZ is implemented. The workaround is to run RVIZ locally. To do this we need to set the local computer to locate the remote MASTER NODE in order to display the right information.Assume:IP: 192.168.1.0 // remote computer (robot)IP: 192.168.1.1 // local computer (host)* ssh into remote computer ***1. ssh -X erratic@192.168.1.0At the remote terminal:2. export ROS_MASTER_URI=http://192.168.1.0:11311 //this ensures that we do not use localhost, but the real IP address as master node3. export ROS_IP=192.168.1.0 //this ensures that ROS knows that we cannot use hostname directly (due to DHCP firewall issues)4. roscoreAt the local terminal:1. export ROS_MASTER_URI=http://192.168.1.0:11311 //tells local computer to look for the remote here2. export ROS_IP=192.168.1.1 //this ensures that ROS knows that we cannot use hostname directly (due to DHCP firewall issues)3. rosrun rviz rviz // fires up rviz on local computer. It will attach to the master node of the remote computer to check, open a remote terminal 1. rxgraph Note, everytime a new terminal is open on the local/remote computer, we have to call the 2 exports commands. To make this permanent, edit the ~/.bashrc file:1. sudo gedit ~/.bashrc //add the two export commands at the end of the file.2. source ~/.bashrc //and restart terminal
VNC远程显示3D界面
http://www.bubuko.com/infodetail-2140514.html
由于teamviewer完美的解决了我的问题就没有仔细深究,上面是vnc可能的解决办法。
2.树莓派设置插电自动连网。
修改/etc/network/interfaces文件,把它修改成这个样子
auto lo
iface lo inet loopback
auto eth0
iface eth0 inet dhcp
allow-hotplug wlan0
auto wlan0
iface wlan0 inet dhcp
wpa-ssid YOUR-SSID-HERE
wpa-psk YOUR-PASSWORD-HERE
主要是添加wpa-ssid和wpa-psk,直接把你要连接的wifi的ssid和对应密码写上就行了。
重启网络
/etc/init.d/networking restart
service network restart
我连的是手机热点,所以。流量哗哗的。。
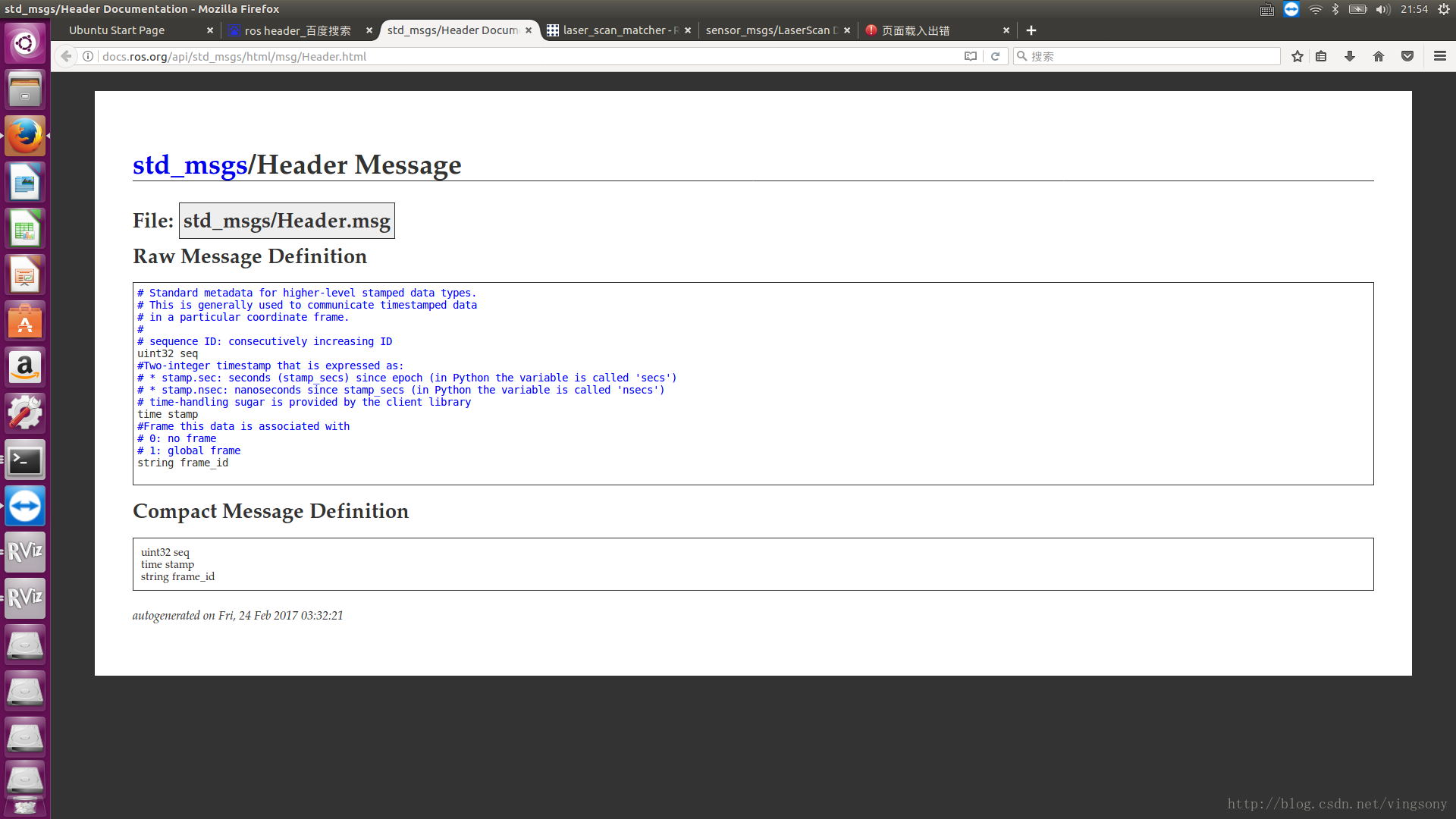
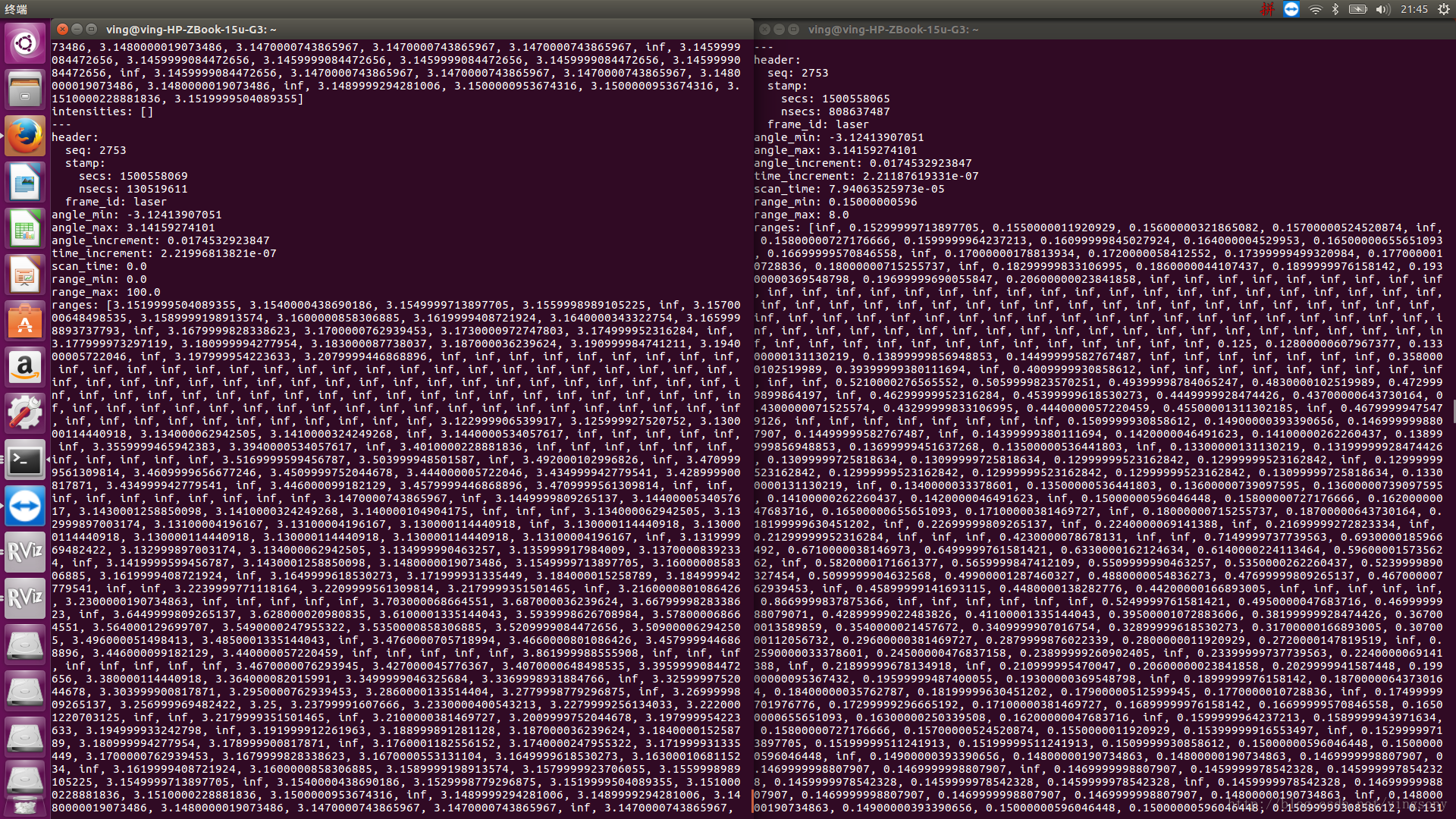
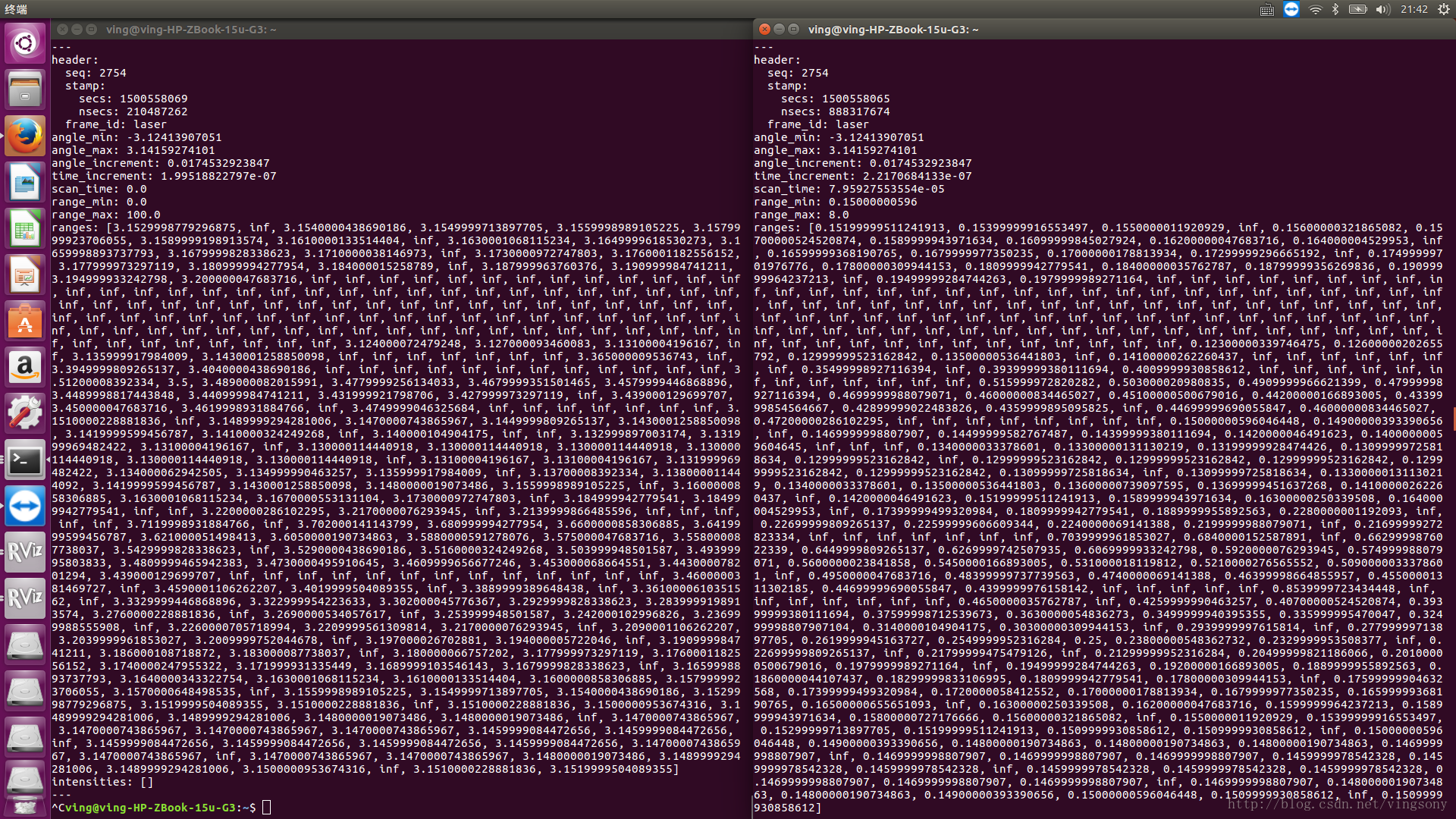
3.ros中激光雷达数据的提取,例如要我要某个角度或者某个长度的雷达数据,就要对原始数据进行操作,但是疑点还是很多。明天继续分析。还是要注重基础。















 5090
5090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









