







参考资源
CANopen协议栈源码:
https://github.com/CANopenNode/CANopenNode
CANopen协议栈基于STM32平台开发的demo,不过这里是基于STM32CUBEIDE开发的:
https://github.com/CANopenNode/CanOpenSTM32
协议栈的配置工具:
https://github.com/CANopenNode/CANopenEditor
00_NMT网络管理的模块控制
https://blog.csdn.net/zaichen321/article/details/128841446
安富莱电子开发板视频教程
https://www.armbbs.cn/forum.php?mod=viewthread&tid=121619&extra=page%3D1
周立功《CANopen轻松入门》
程序的准备
0x1800参数配置
使用CANopenEditor打开之间的配置工程,主要修改0X1800的配置参数,如下图所示:
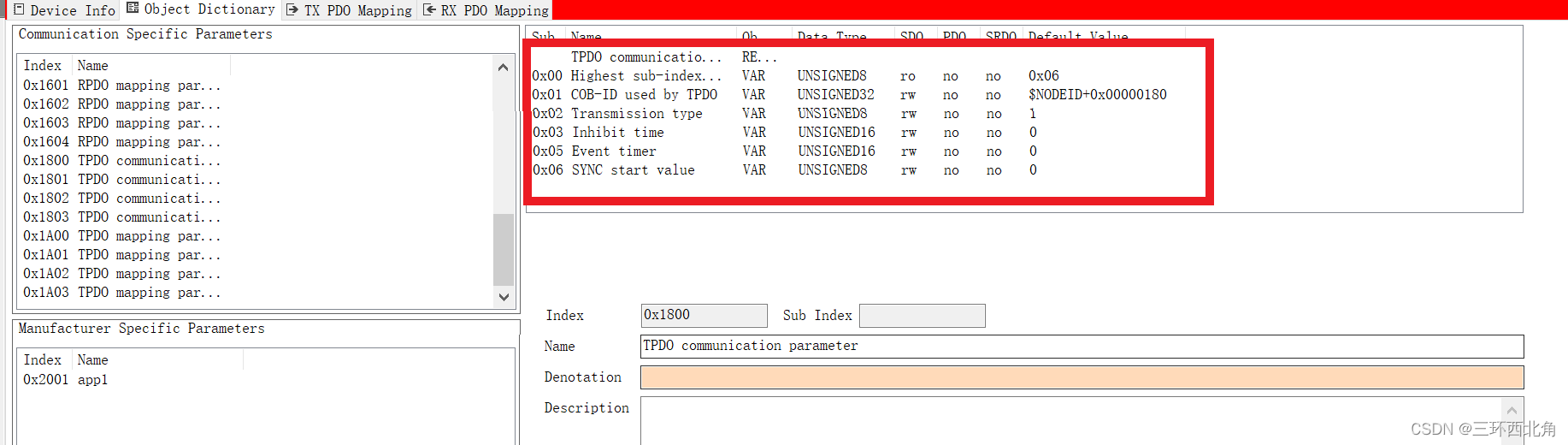
这里的变量注释如下:
COB-ID used by TPDO:TPDO反馈时的数据ID,即节点ID+0X180;
Transmission type:没收到多少个同步报文反馈一次数据;
Inhibit time:定义了对该数据对象的传输服务的两个连续调用之间必须经过的最小时间
Event timer:这个待补充;
SYNC start value:同步开始的计数,这里说的是开始进行数据同步时,0x80同步报文的计数值;
0x1400参数配置
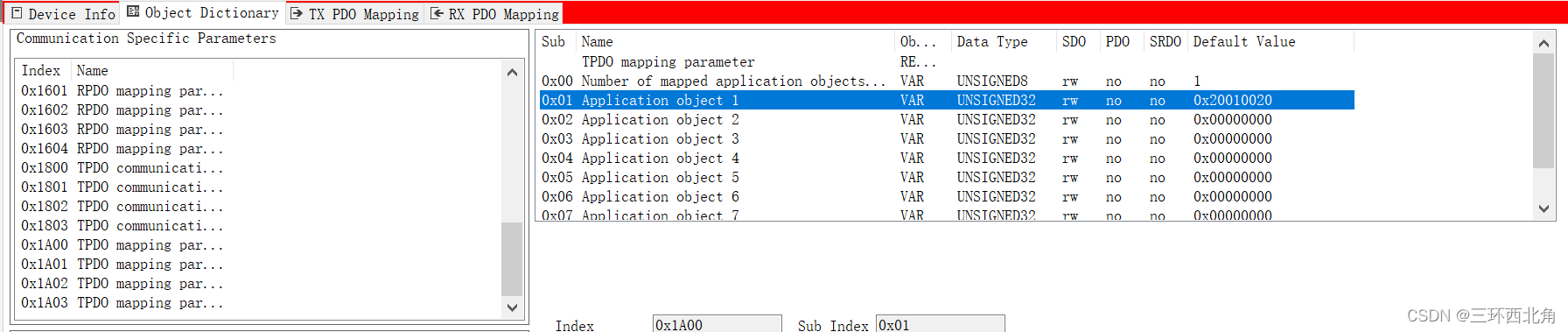
这里会将TPDO要发送的变量和TPDO进行关联,应该会自动添加,检查一下没有问题就可以
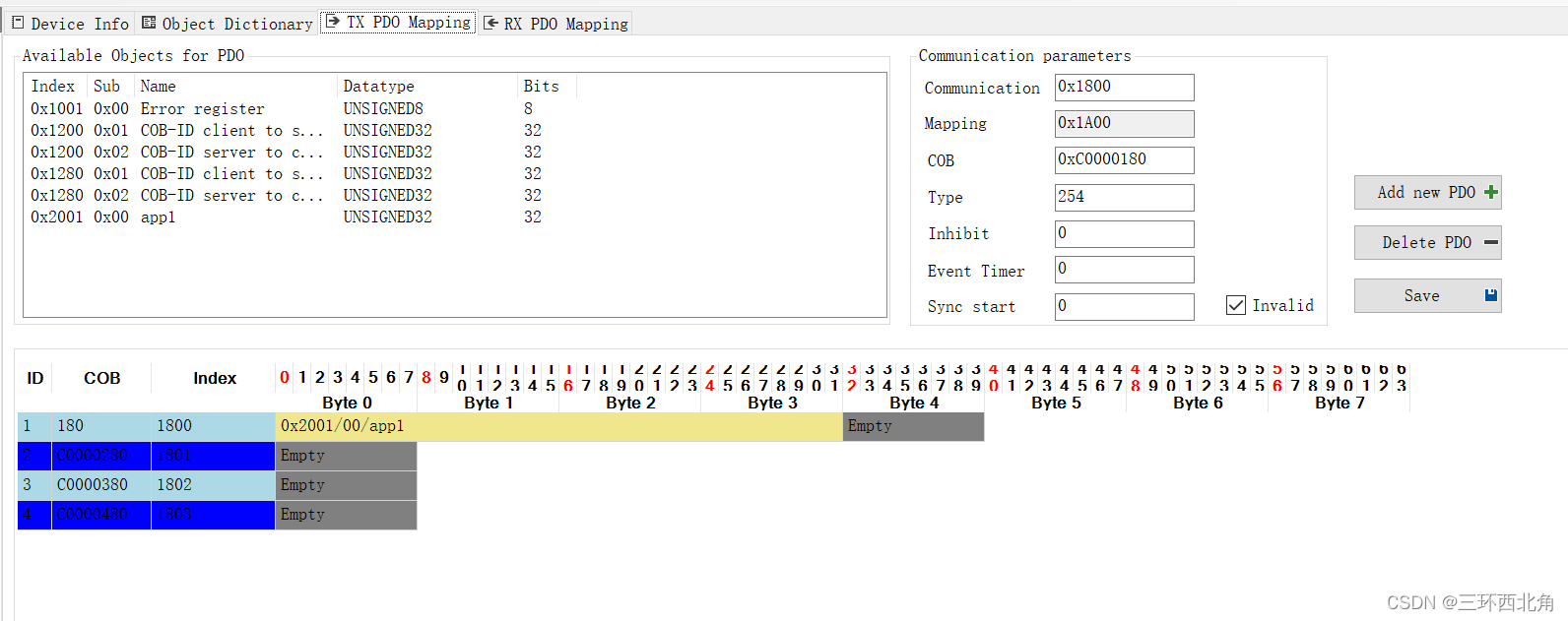
TPDO参数报文绑定
在TPDO界面配置发送数据的字节,可以看到发送报文为0x180+NODEID形式;
开发板程序修改
程序需要进行修改,模拟一下要发送的变量,这里OD_RAM.x2001_app1=0X0B,即app1的值配置为0x0B
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN1_Init();
MX_TIM14_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
CANopenNodeSTM32 canOpenNodeSTM32;
canOpenNodeSTM32.CANHandle = &hcan1;
canOpenNodeSTM32.HWInitFunction = MX_CAN1_Init;
canOpenNodeSTM32.timerHandle = &htim14;
canOpenNodeSTM32.desiredNodeID = 5;
canOpenNodeSTM32.baudrate = 125;
canopen_app_init(&canOpenNodeSTM32);
// OD_RAM.x2002_obj_cyclicvar = 0;
// OD_RAM.x2001_obj_acyclicvar = 0;
OD_RAM.x2001_app1=0X0B;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, !canOpenNodeSTM32.outStatusLEDGreen);
HAL_GPIO_WritePin(LD4_GPIO_Port, LD4_Pin, !canOpenNodeSTM32.outStatusLEDRed);
canopen_app_process();
}
/* USER CODE END 3 */
}
配置完成后导出为OD.h和OD.c,重新编译工程。
发送测试
采用USBCAN200模拟主机发送同步指令,得到开发板的反馈如下:

至此可以确认,canopennode已经将变量的值正常发送。


















 2197
2197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











