







1. Ubuntu版本和ROS版本的对应关系
(安装什么版本Ubuntu就安装什么版本的ROS)
| Ros发布时间 | Ros版本 | 相对应的Ubuntu版本 |
| 2016.3 | ROS Kinetic Kame | Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 | ROS Jade Turtle | Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 | ROS Indigo Igloo | Ubuntu 14.04 (Trusty) |
| 2013.9 | ROS Hydro Medusa | Ubuntu 12.04 LTS (Precise) |
| 2012.12 | ROS Groovy Galapagos | Ubuntu 12.04 (Precise) |
2.Ubuntu 16.04 64bit+ROS Kinetic的安装
(如果是 Ubuntu 14.04,只需要把下面所有出现 *-kinetic-* 的地方换成 *-indigo-* 就好了)
2.1 软件中心配置
在 Ubuntu 最左上角的搜索按钮中搜索"软件和更新"/"software and update"。

打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiverse."前是打上勾的),本人下载自主服务器,国内服务器下载了几次有问题:
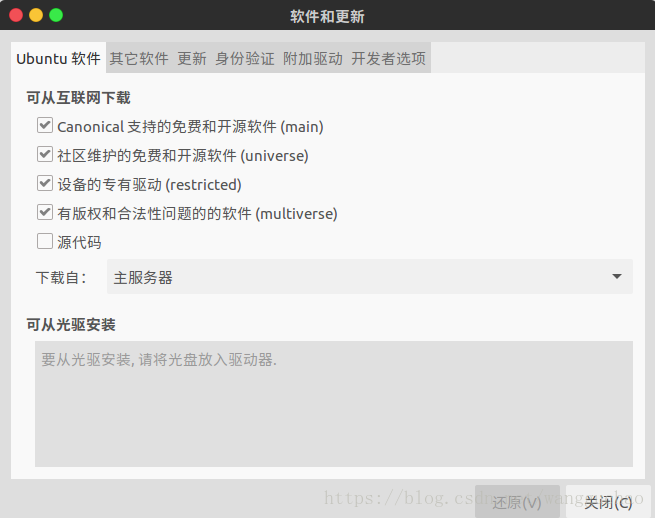
配置完成后就可以关闭该窗口了。
2.2 添加源
打开一个终端(Ctrl + Alt + T), 输入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'设置秘钥:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 安装 ROS
更新系统软件处于最新版:
$ sudo apt-get update然后开始安装 ROS,安装全功能版指令如下:
$ sudo apt-get install ros-kinetic-desktop-full本人安装过程大概五分钟,看个人网络,等着ROS安装完成,如果出现BUG跟据具体情况而定,有可能是网络问题,有时候宽带就是不行,用手机热点就可以。
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-kinetic到现在,虽然是安装完了,但是还不能用。
2.4 初始化ROS
首先需要先初始化 rosdep,具体如下:
$ sudo rosdep init
$ rosdep update 然后初始化环境变量(重要):
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc开发过程中,如果找不到 Package, 找不到node, 很多情况下都是没有添加source或者失败了;如果安装失败,可以再试一次。
你可以安装一个非常常用的插件(有的同学可能不需要安装,这个插件已经存在了):
$ sudo apt-get install python-rosinstall3 测试ROS
首先,启动ROS环境
$ roscore
目录/opt/ros/kinect,文件夹如下:

安装成功。
4.检查环境变量配置
命令:
$ export | grep ROS

5、ROS常用命令

6、ROS应用框架















 1287
1287











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









