






1.绪论




2. 状态空间









3.相图,相轨迹












4. 相图动态分析






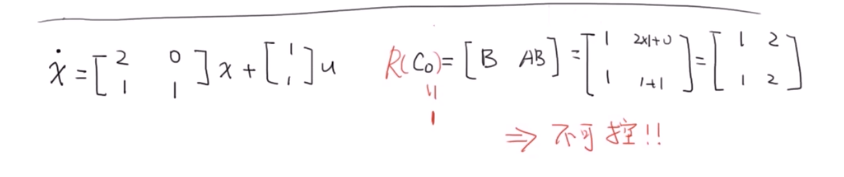
5.系统的可控性









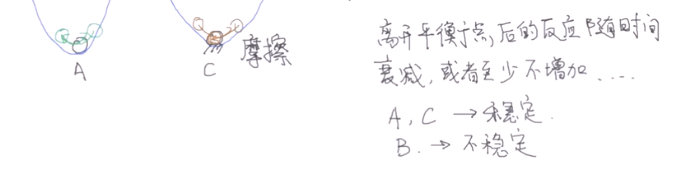
6.李雅普诺夫稳定判据
知乎经典讲解:https://zhuanlan.zhihu.com/p/58738073













8. LQR控制器







https://www.bilibili.com/video/BV1RW411q7FD
https://zhuanlan.zhihu.com/p/87070103
8.5 线性控制器设计之轨迹跟踪







9. 状态观测器设计(上)











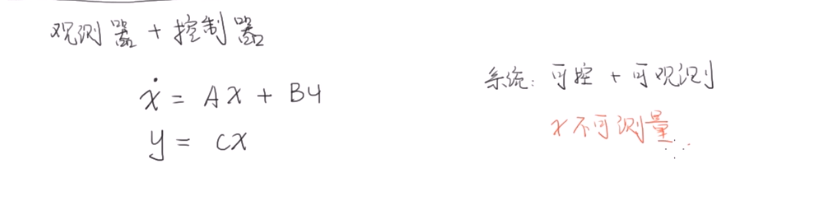
10.可观性与分离原理,观测器与控制器






11.现代控制理论串讲


















 1575
1575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









