







rqt工具的使用
这里介绍一下ROS中无敌强大的rqt工具
安装rqt工具
sudo apt-get install ros-indigo-rqt
sudo apt-get install ros-indigo-rqt-common-plugins
运行rqt
rqt
进入上方菜单栏的Plugins,里面有很多十分有用的用于ROS调试的插件
下面简单列举一些十分有用的插件功能:
| 插件 | 功能描述 |
|---|---|
| topics monitor | 可以监视当前的某一个话题的传输数据,占用带宽,话题频率等等,相当于我们原来的rostopic echo msg_name |
| message publisher | 可以自定义名称发布一个话题,并且指定话题发布的消息类型,发布数据,以及发布频率 |
| message type brower | 可以查看当前所有已经定义的消息类型,包括自己定义的msg,基本相当于rosmsg show msg_name 的功能 |
| robot steering | 可以发布一个话题cmd_vel,发布Twist话题消息,可以可视化的修改速度,转角变量,用于测试一些控制指令十分方便 |
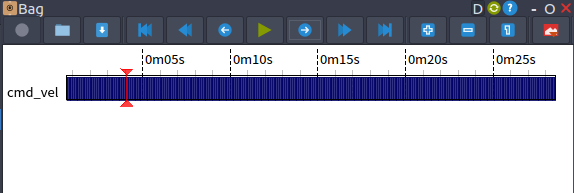
| bag | 可以用于录制一个bag文件包,可以任意选择指定录制哪些话题。也可以打开一个bag文件包,里面可以很方便的控制bag包play的播放或者暂停,同时可以指定播放前一帧和下一帧 |
bag插件如下图所示:
| 插件 | 功能描述 |
|---|---|
| node_graph | 查看当前节点运行的所有节点 |
| process monitor | 查看当前的所有节点,以及节点的PID,占用CPU,占用内存 |
| launch | 可以方便的在可视化界面下选择package和launch文件, 可以方便的运行和停止launch一个节点 |
| image view | 可以很方便的查看ROS话题中传递的图片消息,这一点方便于我们观察机器人当前看到的图像 |
| plot | 可以将某一个话题的数据(全部数据或部分数据)进行绘图显示,这样可以更加直观看到话题消息的变化,方便于我们调试 |
| tf tree | 可以显示当前的tf树的结构 |
| rviz | 在rqt里面也集成了rviz工具,我们可以很方便的从这里打开rviz工具 |

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









