







rqt工具箱可视为ROS数据的界面调试工具。
rosrun rqt_(按tab键):可以查看所有的rqt工具。
以下介绍为常用的命令。
目录
1 rqt_tf_tree
:查看tf树之间的关系,用于可视化ROS-TF的框架树
每一个节点都是一个tf的link,节点与节点相连接处申明了node信息。
rosrun rqt_tf_tree rqt_tf_tree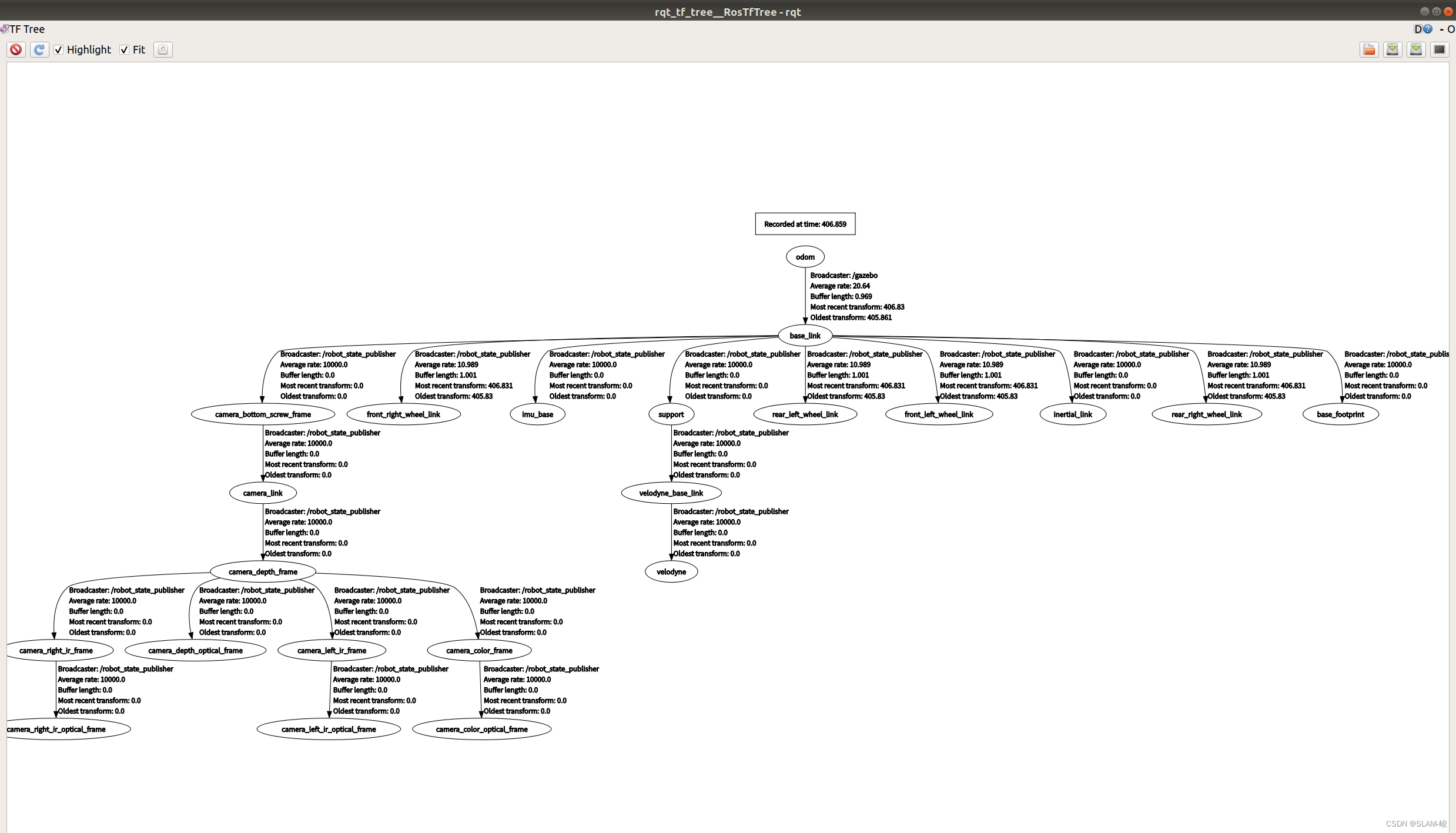
2 rqt_graph
:查看node节点之间的关系,需要理清node到node之间关系时候用到的。
页面左上角选择active是正常运行的节点;选择all,若是存在某个节点,但是节点挂了,节点名前会有“n_”开头的。
rosrun rqt_graph rqt_graph
3 rqt_plot
:rqt_ploy可以可视化一切带有时间戳的数据,只要用话题发布出来了,且数据带有时间戳(ROS的数据都自带时间戳的)
rqt_plot提供了一个GUI插件,使用不同的绘图方式在2D界面中可视化数值,如PID调试数据,IMU数据等等,数据绘制图(用于绘制系统中变量的变化情况,更直观)
rosrun rqt_plot rqt_plot
4 rqt_topic
:ros用于查看topic发布频率的指令。
显示主题调试信息, 包括发布者、 接收者、 发布速率和发布的消息。可以查看消息字段并选择你想要订阅的主题以分析带宽和速率(Hz),以及查看最新发布的消息。
注意, 锁定的主题通常不会持续发布, 所以不会看到任何关于它们的信息。
rosrun rqt_topic rqt_topic //topic发布频率

















 2939
2939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









