




参考http://www.autolabor.com.cn/book/ROSTutorials/chapter1.html
1.首先实现仿真平台在rviz和gazebo的实现:
编写rviz环境下的xacro:
car.urdf.xacro
lidar.urdf.xacro
camera.urdf.xacro
all_component.urdf.xacro (将分component 集成起来)
编写gazebo环境的xacro:
仿真机器人物体:
camera_gazebo.urdf.xacro
car_gazebo.urdf.xacro
lidar_gazebo.urdf.xacro
封装机器人惯性矩阵:
head.urdf.xacro
仿真传感器:
sensor_kinect_gazebo.urdf.xacro
sensor_camera_gazebo.urdf.xacro
sensor_lidar_gazebo.urdf.xacro
仿真小车运动:
move_gazebo.urdf.xacro
集成所有xacro:
all_component_gazebo.urdf.xacro
如下图:
2.编写launch文件:
仿真功能:
car_play.launch :只显示在rviz上的
car_play_gazebo.launch :同时在rviz和gazebbo中显示,并运行了仿真环境
基础功能:
amcl.launch 调用amcl包
path_planning.launch 调用move_base包
2DSLAM建图功能:
运行:car_play_gazebo.launch 和 car_mapping.launch
地图服务功能:
保存地图:
先进行建图:car_play_gazebo.launch 和 car_mapping.launch
再进行保存:map_save.launch
读取地图:map_read.launch
amcl定位演示:car_play_gazebo.launch 和 amcl_car_play.launch
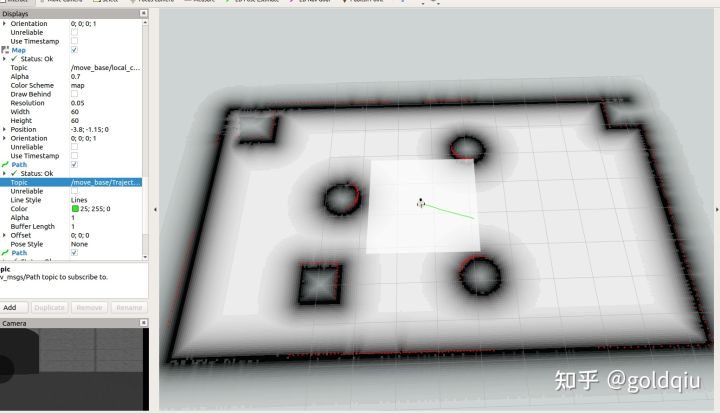
路径规划:
全局路径规划:car_play_gazebo.launch 和 global_navigation.launch
局部路径规划:car_play_gazebo.launch 和 local_navigation.launch
3.其他
nav.pgm和 nav.yaml为保存的地图文件
box_house.world 为仿真环境世界文件
这个仿真功能包的目录结构:
├── CMakeLists.txt
├── config
│ ├── arbotix_car_play.yaml
│ ├── base_local_planner_params.yaml
│ ├── costmap_common_params.yaml
│ ├── global_costmap_params.yaml
│ ├── local_costmap_params.yaml
│ ├── robot_mapping.rviz
│ └── robot_play.rviz
├── launch
│ ├── amcl_car_play.launch
│ ├── amcl.launch
│ ├── car_mapping.launch
│ ├── car_play_gazebo.launch
│ ├── car_play.launch
│ ├── global_navigation.launch
│ ├── local_navigation.launch
│ ├── map_read.launch
│ ├── map_save.launch
│ └── path_planning.launch
├── map
│ ├── nav.pgm
│ └── nav.yaml
├── meshes
├── package.xml
├── urdf
│ ├── urdf
│ └── xacro
│ ├── all_component_gazebo.urdf.xacro
│ ├── all_component.urdf.xacro
│ ├── camera_gazebo.urdf.xacro
│ ├── camera.urdf.xacro
│ ├── car_gazebo.urdf.xacro
│ ├── car.urdf.xacro
│ ├── head.urdf.xacro
│ ├── lidar_gazebo.urdf.xacro
│ ├── lidar.urdf.xacro
│ ├── move_gazebo.urdf.xacro
│ ├── sensor_camera_gazebo.urdf.xacro
│ ├── sensor_kinect_gazebo.urdf.xacro
│ └── sensor_lidar_gazebo.urdf.xacro
└── worlds
└── box_house.world整个项目工程代码:
链接:https://pan.baidu.com/s/1zFbXqdjy_6wtbRf_4bkpog
提取码:fksa
仿真效果:

















 2547
2547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









