






目录
一、系统动态性能指标计算公式
| 系统类型 | 系统闭环传递函数 | 单位阶跃响应 | 性能指标计算公式 |
| 一阶系统 | | T:系统时间常数 | |
| 过阻尼二阶系统 |
| | 查图法:见图1,已知 |
| 欠阻尼二阶系统 | |||
注:ts均表示进入5%误差带。
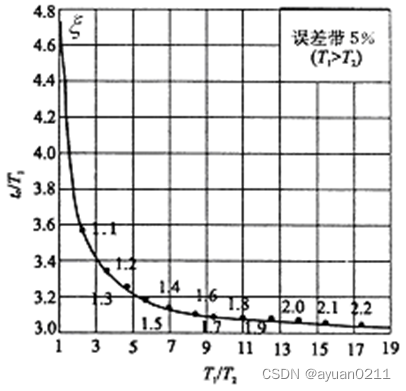
图1:过阻尼系统,T1/T2与ts/T1的关系曲线
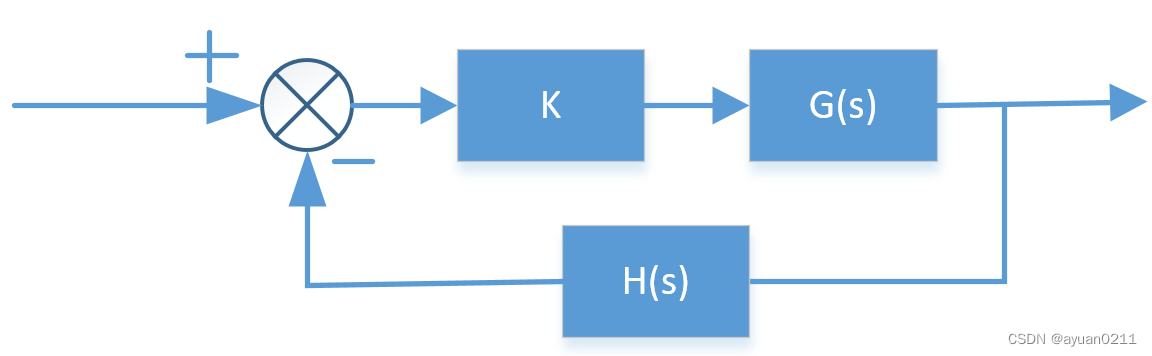
二、利用根轨迹分析系统动态性能
针对此控制结构:
(一)、绘制系统根轨迹
1.根轨迹方程
1+KG(s)H(s)=0-->KG(s)H(s)=-1
模值条件:|KG(s)H(s)|=1(闭环极点到所有开环零点距离之积/闭环极点到所有开环极点距离之积)
相角条件:
(n-m-1/m-n-1)取决于系统分母阶次和分子阶次那个高。
2.根轨迹绘制步骤
(1)开环传递函数零极点确定:
a.求解根轨迹增益K从0的闭环根的变化:直接在复平面绘制
的开环传递函数的零极点;
b.求解除K以外的参数从0的闭环根的变化:首先需要根据开环传递函数,写出标准特征方程1+GH=0;其次,构造等效开环传递函数,含变参的放分子,不含变参的放在分母;若此时分子阶次高于分母阶次,则将变参取倒数。
举个栗子1:
单位反馈系统的传递函数为,绘制根轨迹。
写出标准特征方程,
将问题从转化为
,此时根轨迹方向刚好相反。
(2)根据开环零极点,根轨迹绘制法则,绘制闭环根轨迹。
3.根轨迹绘制法则
1.根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环极点个数n>开环零点个数m,则有n-m条根轨迹终止于无穷远处。
2.根轨迹的分支数,对称性和连续性:根轨迹的分支数=系统阶次(一般分子阶数比分母阶数高,即一般情况下等于极点个数),根轨迹连续且对称于实轴。
3.实轴上的根轨迹:从实轴最右端的开环零、极点算起,奇数开环零、极点到偶数开环零、极点之间的区域必是根轨迹。
4.闭环根之和::
时,闭环根之和保持一个常值。推论--
时,一部分根左移,另一部分根必右移,且移动总量为0。(可以粗略判断分离点的位置)
定理:若系统有2个开环极点,1个开环零点,且复平面存在根轨迹,则复平面的根轨迹一定是以零点为圆心的圆弧。
5.渐近线:与实轴交点:
渐进线与实轴夹角: k=0,1…n-m-1(m-n-1)
n>m时,n-m条根轨迹趋于无穷远处。
6.分离点d:(对应实轴上重根)
多项式重根的充要条件:
7.与虚轴交点:a,系统临界稳定点;b,s=jw是根轨迹方程的根;
8.出射角/入射角(起始角/终止角):(相角条件)
4.MATLAB绘制根轨迹
num=[num1,num2,num3,…]; %开环传函分子多项式系数
den=[den1,den2,den3,den4,…]; %开环传函分母多项式系数
sys=tf(num,den); %系统传递函数模型
rlocus(sys); %绘制系统的根轨迹图
rlocfind(sys); %寻找根轨迹上特殊点的值
poles=rlocfind(sys,20) %当2根轨迹增益=20时根轨迹闭环特征根
k=rlocfind(sys,1.56i) %根轨迹闭环特征根=1.56i时,对应根轨迹增益(二)、根据闭环根轨迹分析系统性能
绘制栗子1的根轨迹如图:
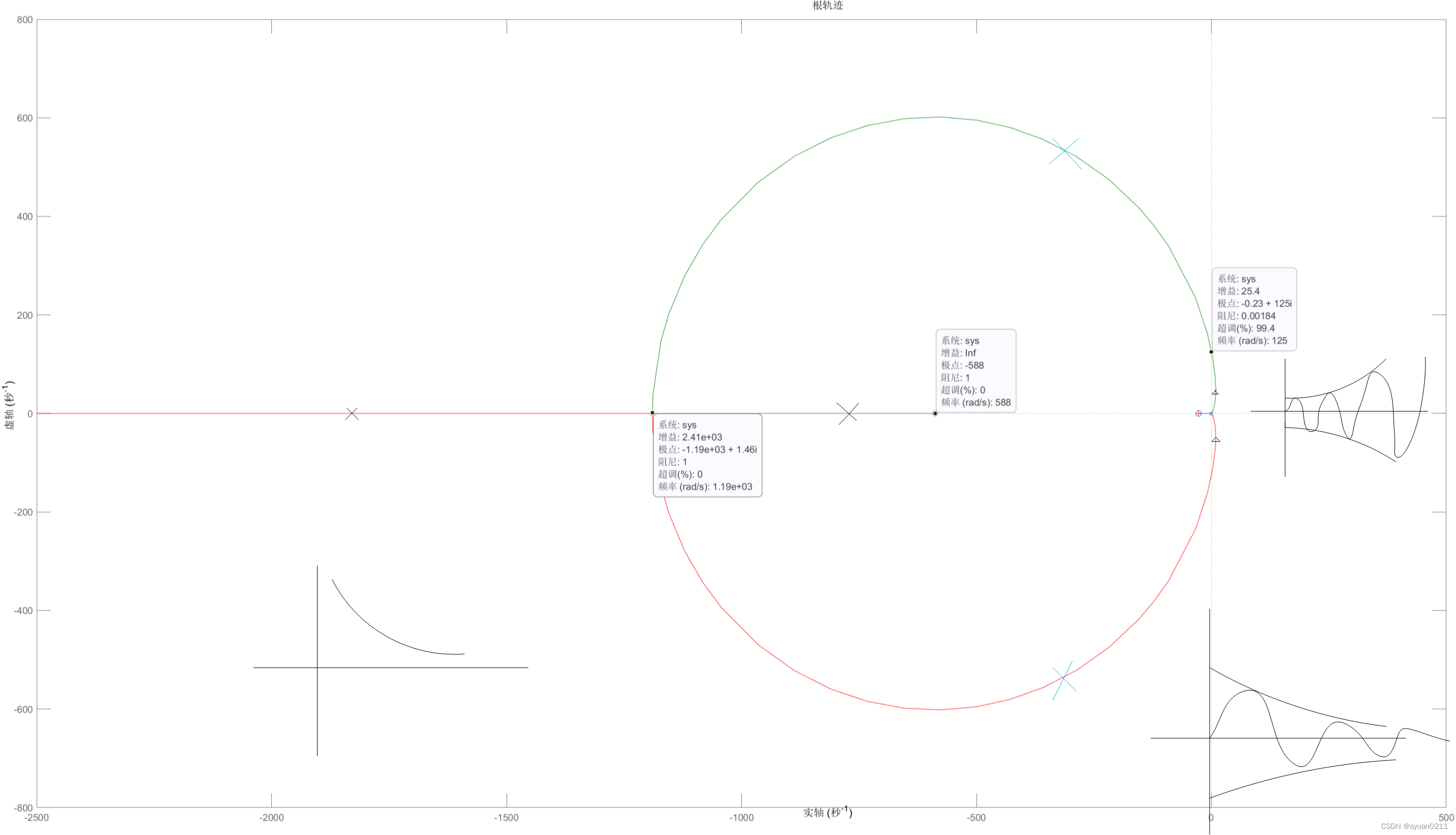
由根轨迹结合系统动态性能分析,可大致判断,当根轨迹增益1/T>2410即T<0.000415时,,过阻尼系统单调稳定,无超调量;
当根轨迹增益2410>1/T>25.4即0.000415<T<0.0394时,,欠阻尼系统震荡衰减稳定,有超调;
当1/T>0.0394时,系统震荡发散。















 2189
2189











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











