







上一节讨论了Xcp通过DAQ测量的必要性,DAQ方法解决了以下两个轮询问题:
- 确保测量值与ECU中的事件相关性。在确保所有计算都已完成之前,不会传输测量值。
- 为了减少总线负载,测量过程被细分为两个阶段:在配置阶段,Master将它感兴趣的值传递给Slave,第二个阶段只涉及将Slave的测量值传递给Master。
现在如何将测量值的获取与ECU中的进程耦合起来?下图给出了ECU中计算周期与参数X、Y变化的关系。
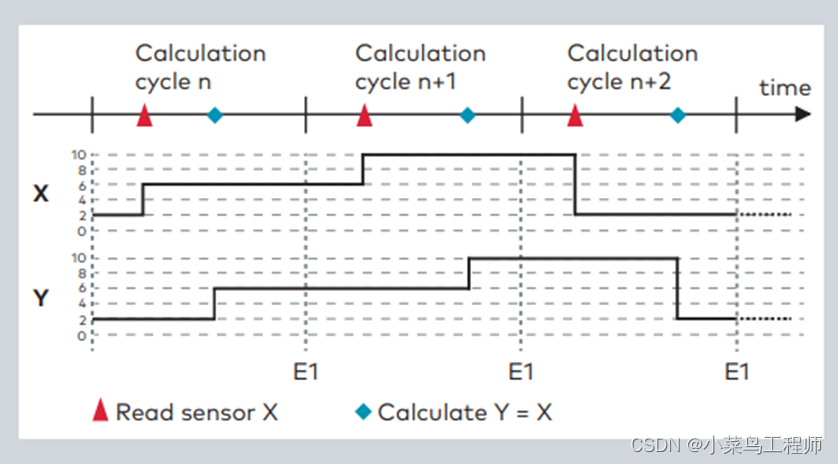
让我们来看一下ECU中的序列:当到达事件E1(=计算周期结束)时,就获得了所有参数并进行了计算。这意味着在此时间点,所有值必须彼此匹配并相互关联。这意味着我们使用事件同步测量方法。这正是在DAQ机制的帮助下实现的:当Slave中的算法到达“计算周期完成”事件时,XCP Slave收集测量参数的值,保存在缓冲区中并发送给Master。
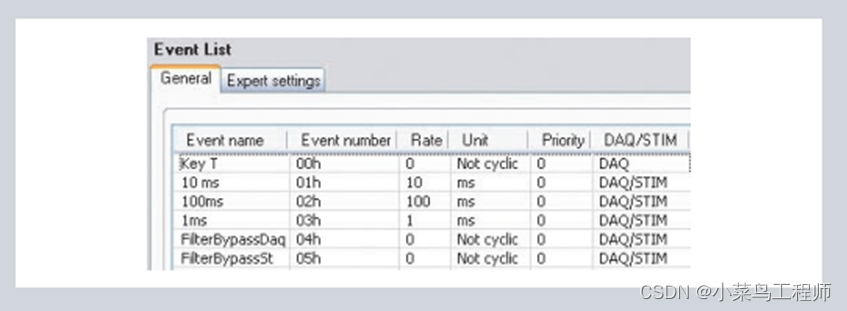
一个事件并不一定是一个循环的,时间等距的事件。例如,在引擎控制器的情况下,它可能是角度同步的。这使得两个事件之间的时间间隔依赖于引擎转速。例如,驱动程序激活开关,也是一个在时间上无论如何都不是等距离的事件。
用户选择信号,除了实际测量对象外,用户还必须为测量参数选择底层事件。事件以及测量对象对事件可能的赋值必须存储在A2L文件中。
在正常情况下,将测量值同时赋给多个事件没有任何意义。通常,一个参数只在一个周期内修改(例如,只在10毫秒间隔内修改),而不会在多个周期内修改(例如,在10毫秒和100毫秒间隔内修改)
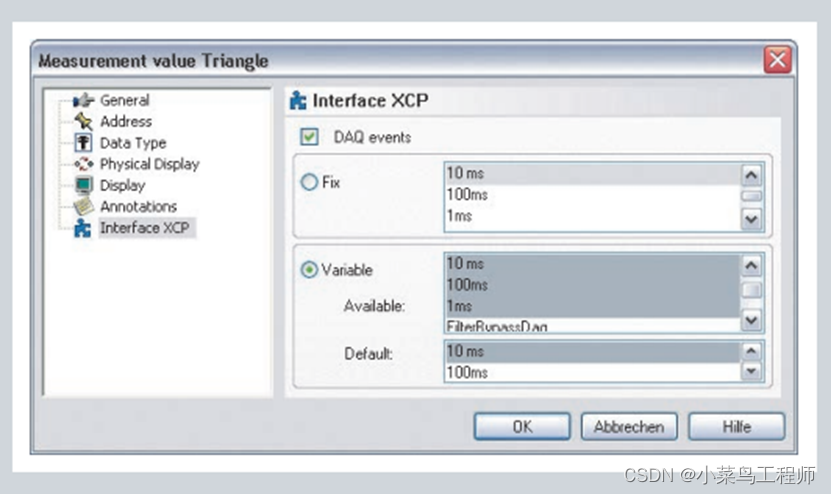
如图显示,“Triangle”参数原则上可以用1 ms、10 ms和100 ms事件进行测量。默认设置为10毫秒。
用户在配置测量时,为ECU中的事件分配测量参数。
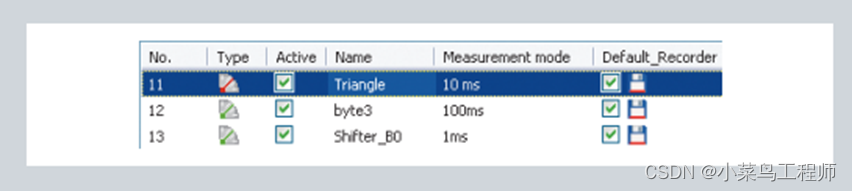
测量信号配置完成后,用户开始测量。XCP Master在所谓的DAQ列表中列出所需的测量参数。在这些列表中,测量信号被分配给每个选定的事件。在实际开始测量之前,这些配置信息会被发送到Slave。然后,当事件发生时,Slave就知道应该读出哪些地址的值并传输。
这解决了轮询中出现的两个问题:带宽得到了最佳利用,因为在测量期间,Master不再需要单独轮询每个值,并且测量值彼此关联。
















 8941
8941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











