







FOC中有感–霍尔传感器角度判定的理解
记录一下FOC 关于霍尔传感器的角度判定问题
霍尔传感器对于角度的判定不是非常精细的,由于只有3个霍尔传感器,最小的分辨角度也只是30度,所以对于SVPWM高频开关来说,这个还是实在太粗了点,此时就需要使用插补的方法细化一下角度。
参考引用的文章链接
霍尔信号、编码器信号与电机转向
[FOC]Hall同步角度(补偿角度)测量方法
一种常用的霍尔区间位置估算方法
1、霍尔传感器的安装位置
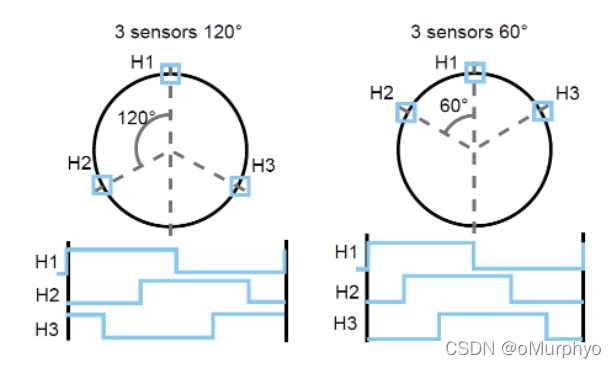
2、扇区判定
这个比较好理解,一看输出波形就知道,4-6-2-3-1-5,这数字这么熟悉,扇区号自然不是问题,只是在未上电时,手动转转电机就更好理解了。
若是60度安装的,会有0和7,若是120度装的,没有这两个,稍微注意下就好
3、角度判定
这个有必要细说一下:
目前为止,到扇区级,已经可以控制到60度范围内了。
一个扇区的60度之内如何确定精确角度?显然纯靠霍尔传感器已经没招了,这里采用一种叫插补的方法来估算角度,意思就是在一个扇区内,按照SVPWM的开关频率分成N份,每隔一个PWM周期,就认为走了一份角度。用专业的术语来表达,就是速度对时间积分。
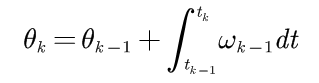
用这么个公式一描述,是不是瞬间高大上了?其实呢,还是二锅头兑那个白开水。把上面这个公式换个等效的描述:
S = V * t
公式的意思:距离(0度到当前角度)= 速度(平均角速度)* t (时间)
用这么个办法一直计算下去,会有累积误差,为了降低累积误差的影响,所以每个扇区都重新校准一下,也就是用霍尔传感器的边沿(换扇区的时刻,这个是肯定准确的)对应的角度重新标定一下当前的角度。
这里没有考虑电机的加减速问题。

















 1219
1219

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









