






 本文介绍如何使用MATLAB的机器人工具箱Simulink库,实现机器人模型的笛卡尔空间运动控制,包括位置和姿态的调整。通过逆解运算模块ikine和显示模块plot,演示了末端位置和姿态变化的控制过程。
本文介绍如何使用MATLAB的机器人工具箱Simulink库,实现机器人模型的笛卡尔空间运动控制,包括位置和姿态的调整。通过逆解运算模块ikine和显示模块plot,演示了末端位置和姿态变化的控制过程。
1、前记:调用机器人工具箱simulink库模型,对机器人模型进行笛卡尔空间运动控制(位置和姿态)
2、操作:
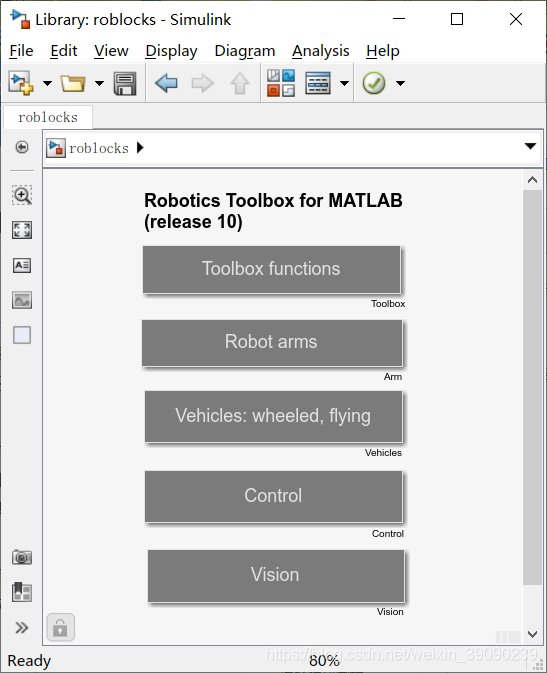
(1)在安装机器人工具箱成功的基础上,打开matlab后在命令行输入 roblocks可以打开机器人工具箱的Simulink库
(2)双击进Robot arms中。里面包含机器人运动学,动力学,速度运动学模块。
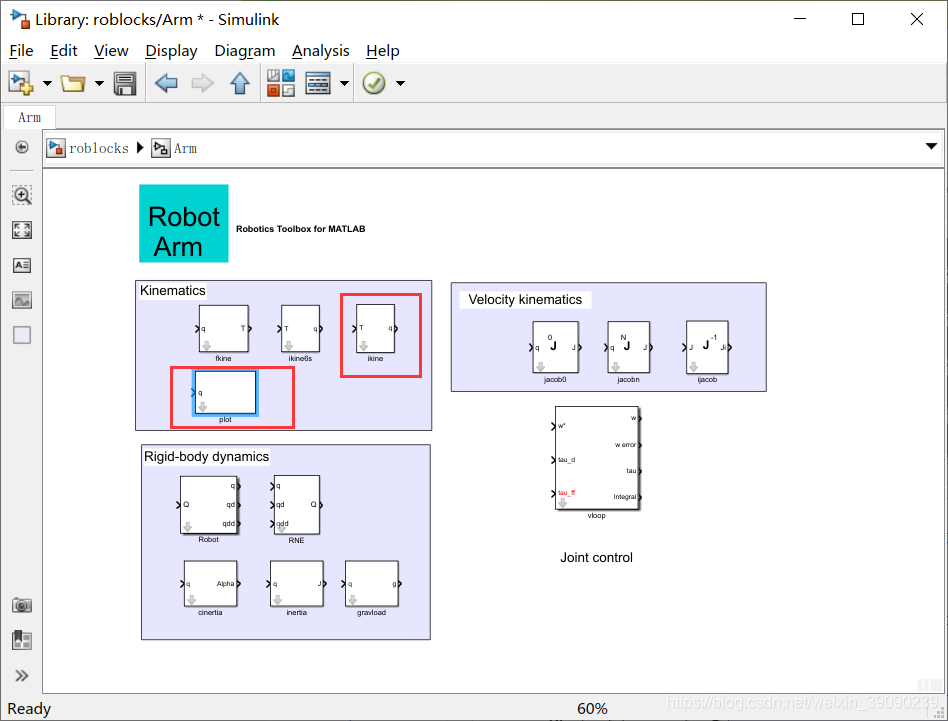
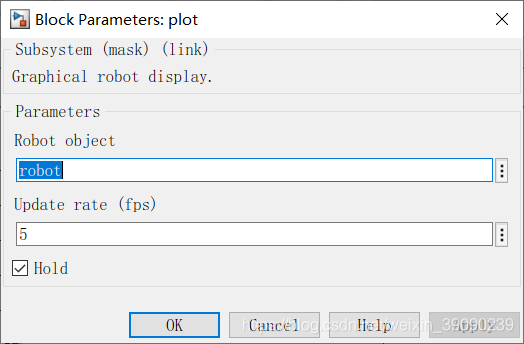
(3)新建一个模型,拖入需要的模块。主要ikne模块用于逆解运算,plot模块用于工具箱机器人模型显示。ikine模块和plot模型都需要双击进行修改。
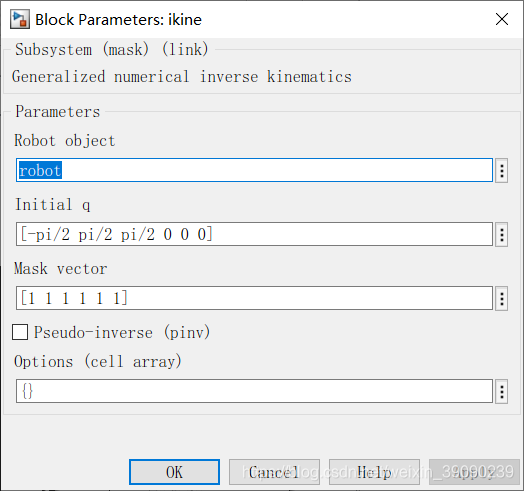
其中robot为通过机器人工具箱建立的机器人SerilLink模型。运行代码生成到matlab工作区中。
机器人工具箱模型生成代码:
Ll(1) = Link ([0 0.104 0 -pi/2 ], 'standard');
Ll(2) = Link ([0 0 0.106 0 ], 'standard');
Ll(3) = Link ([0 0 0.063 0 ], 'standard');
Ll(4) = Link ([0 0 0.0695 -pi/2 ], 'standard');
Ll(5) = Link ([0 0 0 -pi/2 ], 'standard');
Ll(6) = Link ([0 0 0 -pi/2 ], 'standard');
robot=SerialLink(Ll,'name','YourBot');(4)经过逆解运算获得的机器人各关节值可以输入到plot模块中,也可以输入到机器人多体模型中的关节驱动中去。下面机器人多体模型注释不用。只用机器人工具箱模型做显示。
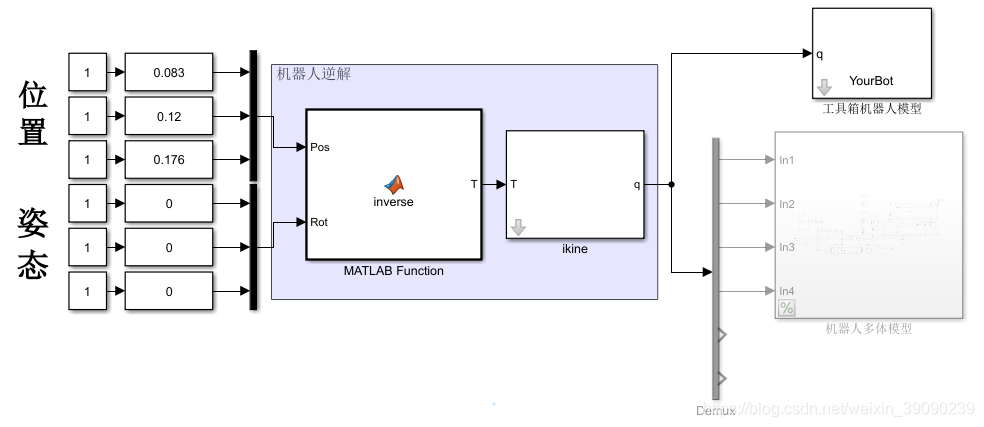
其中,位置和姿态使用slider gain作为输入。matlab function为将位置和姿态整理为支持ikine模块T输入的齐次矩阵形式。
代码为:
function T =inverse(Pos,Rot)
%#codegen
T=zeros(4,4);
% X
t1=Rot(1)*pi/180;t2=Rot(2)*pi/180;t3=Rot(3)*pi/180;
ct = cos(t1);
st = sin(t1);
R1 = [
1 0 0
0 ct -st
0 st ct
];
% Y
ct1 = cos(t2);
st1 = sin(t2);
R2 = [
ct1 0 st1
0 1 0
-st1 0 ct1
];
% Z
ct2 = cos(t3);
st2 = sin(t3);
R3 = [
ct2 -st2 0
st2 ct2 0
0 0 1
];
R=R1*R2*R3;
numMats = size(R,3);
H = zeros(4,4,numMats,'like',R);
H(1:3,1:3,:) = R;
H(4,4,:) = ones(1,1,numMats,'like',R);
H(1,4)=Pos(1);H(2,4)=Pos(2);H(3,4)=Pos(3);
T=H;3.运行结果
改变末端位置(姿态不变):
改变末端姿态(位置不变):
【姿态控制这块还是有问题,来不及修改了,就留着给个简单的思路吧,可以这样玩并且可以扩展的很多且方便】


















 177
177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











