






背景:多机通信,一端用Fastdds,一端用Ros2.
1:
在ubuntu操作系统下安装Fastdds。
https://www.eprosima.com/index.php/products-all/eprosima-fast-dds
从官网下载最新版本,二进制一键安装,安装指南如下:
1. Linux installation from binaries — Fast DDS 2.7.0 documentation (eprosima.com)
安装完之后,在终端输入fastdds,确认安装是否成功
2:
在局域网内另一台虚拟机中安装Ros2,这里为了图省事,直接装的ros2docker
参考下方连接安装。
https://zhuanlan.zhihu.com/p/553592532
docker run时,需要加入option: --net=host,配置网络。
进入容器后,首先source,不同的ros2版本,setup.bash的地址不同。
![]()
再在终端输入ros2,查看ros2是否正常运行。
3. 编写fastdds程序
参考下方连接,从头到尾编写一遍demo,确认单fastdds程序收发无误。
到这步,如果不用ros2,fastdds通信已经没有问题了。参考代码进行修改即可。
4. 这步很关键。
topic是通过fastdds-gen,处理idl文件生成的。例如上例中的Helloworld.idl
见下图,处理完idl后,会自动生成一些列接口文件:
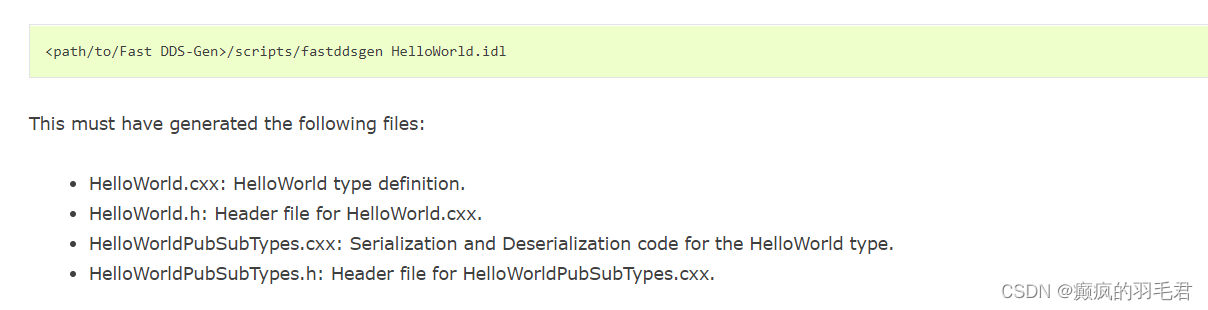
但是如果要与Ros2通信,直接按上图调用fastddsgen是不行的。
需要加入option:-typeros2,表示该idl是为了与Ros2匹配的。
![]()
具体参考以下链接
2. Usage — Fast DDS 2.7.0 documentation (eprosima.com)
5. 这步非常关键。
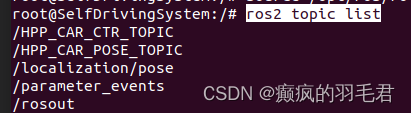
fastdds端的topic名字前需要加入前缀rt/(可能跟ros2版本有关),才能被ros2识别。

在ros2中,打印topic,可以发现在ros2中,rt/并不显示。
6. 两端需要处于同一网段下,fastdds端发送数据,ros端打印数据,如下:
调用fastdds编译生成的可执行程序发送topic:

利用ros2打印数据,如下:
ros2 topic echo /topic_name 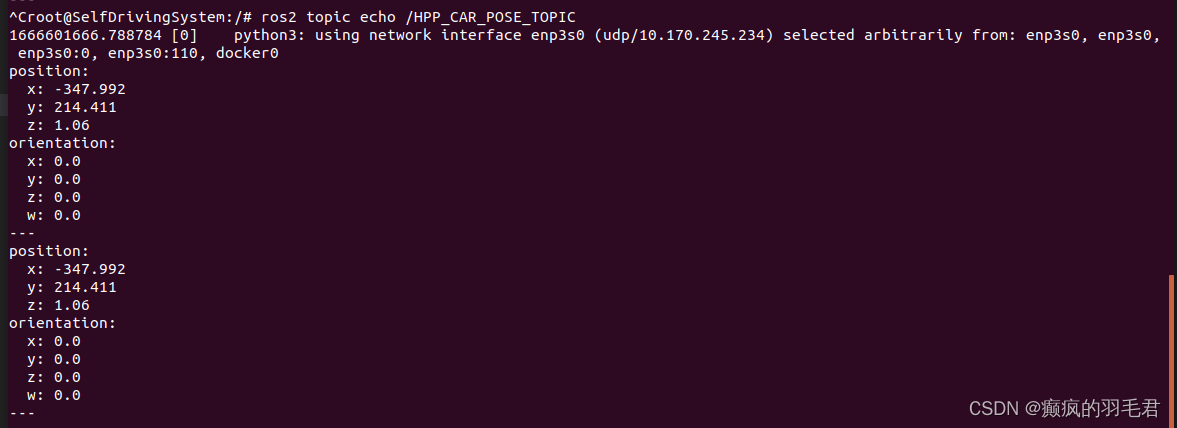 至此,ros2与fastdds多机通信完成,本文档写的不太详细,但是我自己卡住很久的点记录在文中了。推荐走一遍fastdds教程。
至此,ros2与fastdds多机通信完成,本文档写的不太详细,但是我自己卡住很久的点记录在文中了。推荐走一遍fastdds教程。















 763
763











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









