







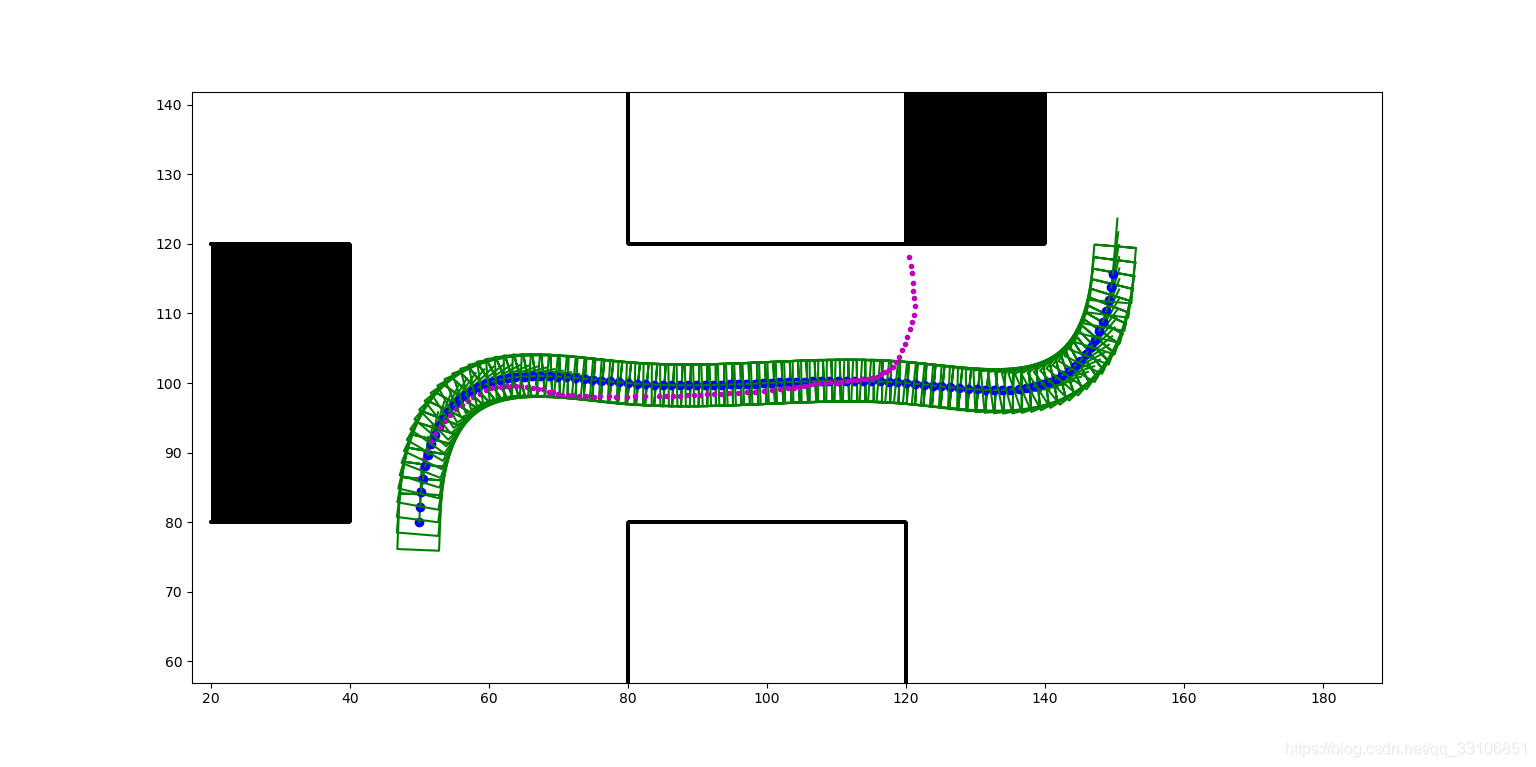
仿真单线激光雷达160个点序的单独icpSLAM定位,红色点为定位路径
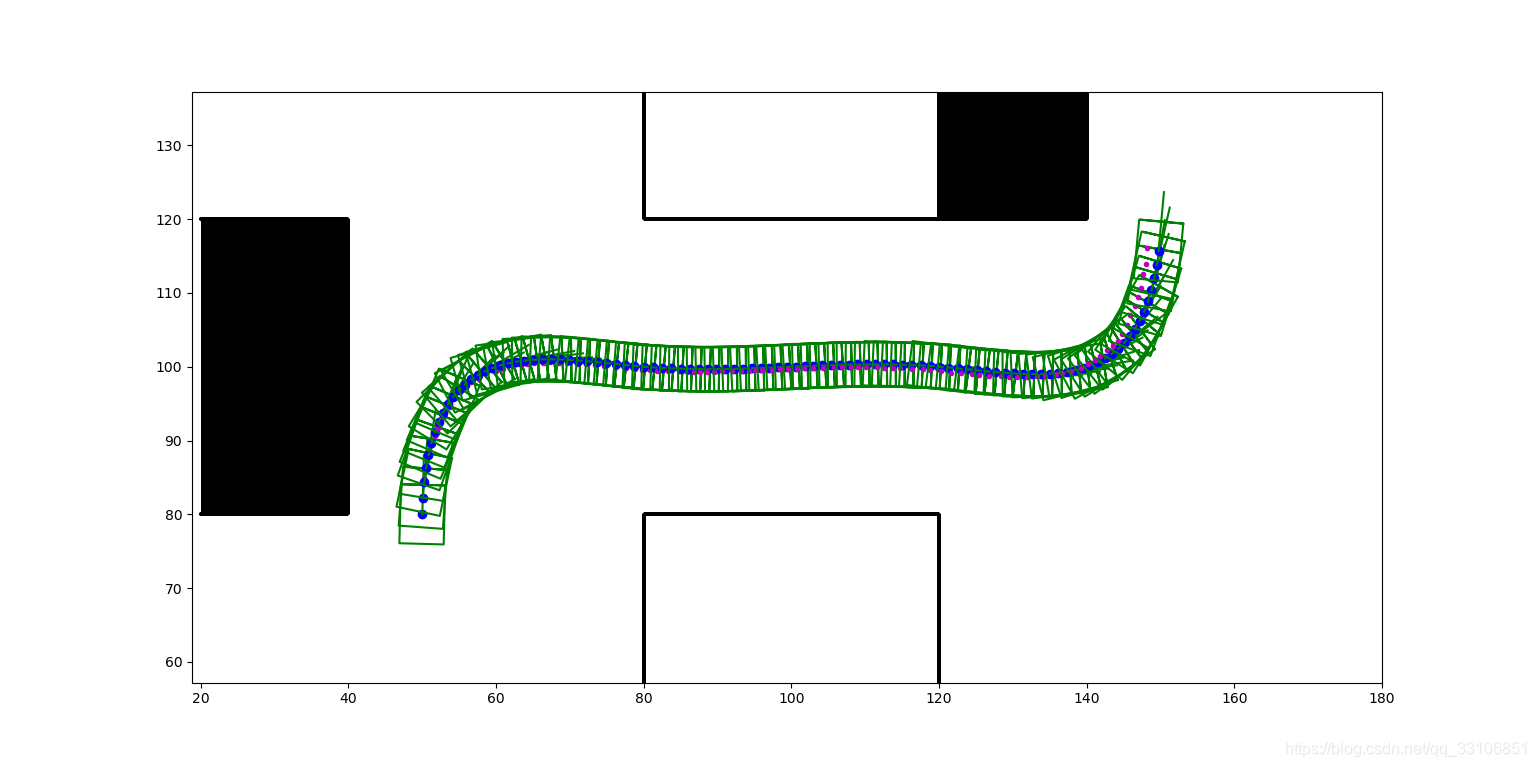
仿真单线激光雷达240个点序的单独icpSLAM定位,红色点为定位路径
红色点为航迹推算定位

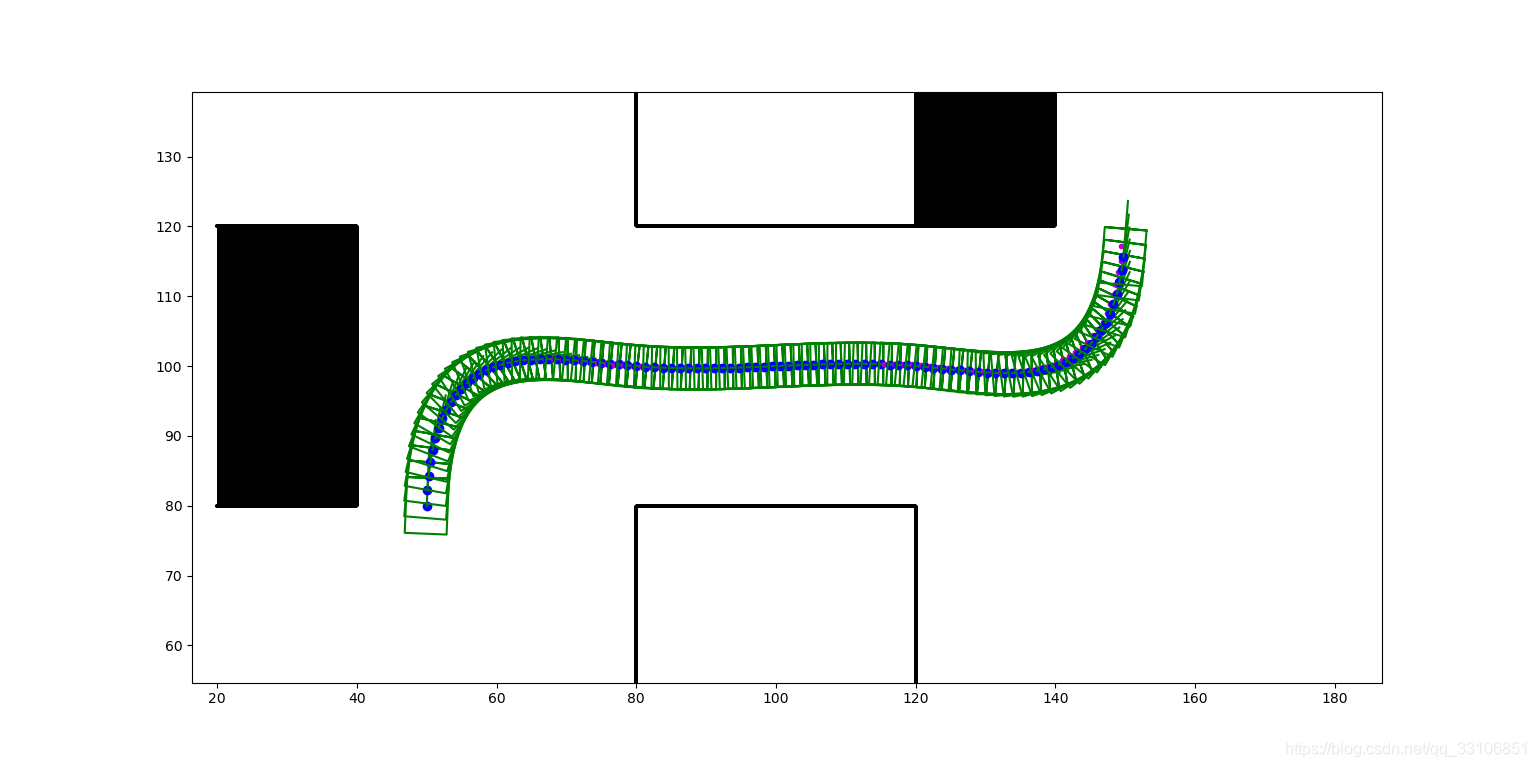
红色点融合240个点序的SLAM定位,红色点为定位路径定位
二维激光雷达ICP_SLAM定位学习
最新推荐文章于 2025-08-13 07:30:00 发布
 本文探讨了使用不同点序数量的单线激光雷达进行独立icpSLAM定位的效果对比,包括160个点序与240个点序的情况,并展示了相应的定位路径。此外,还介绍了航迹推算定位方法及融合240个点序的SLAM定位结果。
本文探讨了使用不同点序数量的单线激光雷达进行独立icpSLAM定位的效果对比,包括160个点序与240个点序的情况,并展示了相应的定位路径。此外,还介绍了航迹推算定位方法及融合240个点序的SLAM定位结果。

















 15万+
15万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









