





利用 PCL 可以分割坐落于某一平面上的物体,首先要对整体点云执行平面分割,以找到场景中的某一平面,然后利用 pcl::ExtractPolygonalPrismData 类,可以分割出在该平面之上的物体聚类。
具体的使用流程是:
- 加载点云
- 滤波之类的预处理(这一步可有可无,取决于你的点云是否需要滤波)
- 对整体点云执行 RANSAC 平面分割,得到某一平面的内点索引
inliers和平面方程系数coefficients - 利用
pcl::ExtractIndices类提取内点,将提取到的内点保存到新的点云中 - 为内点点云创建二维凸多边形(或者凹多边形)
- 利用
pcl::ExtractPolygonalPrismData类,分割出位于平面之上的物体
以下是我的代码
#include <pcl/io/pcd_io.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_polygonal_prism_data.h>
#include <pcl/surface/concave_hull.h>
#include <pcl/visualization/pcl_visualizer.h>
int main (int argc, char** argv)
{
// 加载点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud);
// 为点云做一次直通滤波
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0, 1.1);
pass.filter (*cloud_filtered);
std::cerr << "cloud_filtered->size = " << cloud_filtered->size () << std::endl;
// 对滤波之后的点云做平面分割,目的是确定场景中的平面,并得到平面的内点及其系数
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setDistanceThreshold (0.01);
seg.setMaxIterations(500);
seg.setInputCloud (cloud_filtered);
seg.segment (*inliers, *coefficients);
std::cerr << "inliers->indices.size = " << inliers->indices.size () << std::endl;
// 把平面内点提取到一个新的点云中
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ExtractIndices<pcl::PointXYZ> ex ;
ex.setInputCloud(cloud_filtered);
ex.setIndices(inliers);
ex.filter(*cloud_plane);
// 对平面内点的点云创建二维的凹多边形
// 凸多边形的效果不太好,是凹是凸取决于具体的点云,可视化一下 cloud_hull 点云就知道了
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_hull (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ConcaveHull<pcl::PointXYZ> hull;
hull.setInputCloud (cloud_plane); // 注意这里,输入点云是平面内点的点云
hull.setAlpha(0.1);
hull.reconstruct (*cloud_hull); // 这一步就把平面内点的外接凹多边形创建出来了
std::cerr << "cloud_hull->size = " << cloud_hull->size () << std::endl;
// 最后一步,分割平面上的物体
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_object (new pcl::PointCloud<pcl::PointXYZ>);
if (hull.getDimension() == 2)
{
pcl::PointIndices::Ptr indices_object (new pcl::PointIndices);
pcl::ExtractPolygonalPrismData<pcl::PointXYZ> prism ;
prism.setInputCloud(cloud_filtered); // 注意这里,输入点云是过滤后的点云
prism.setInputPlanarHull(cloud_hull); // 再把平面的凹多边形输入进去
prism.setHeightLimits(0.01, 0.5); // 从平面上 1cm 到 50cm 的高度范围之内分割物体
prism.segment(*indices_object); // 执行分割,得到物体的点索引
ex.setIndices(indices_object);
ex.filter(*cloud_object); // 把物体单独提取到一个新的点云中
std::cerr << "cloud_object->size = " << cloud_object->size() << std::endl;
}
// 以下都是可视化部分
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->addCoordinateSystem (0.5);
int v1 ;
viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(cloud_filtered, 255, 0, 0);
viewer->addPointCloud (cloud_filtered, red, "cloud_filtered", v1);
int v2 ;
viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> green(cloud_object, 0, 255, 0);
viewer->addPointCloud (cloud_object, green, "cloud_object", v2);
while (!viewer->wasStopped ())
{
viewer->spinOnce ();
}
return 0;
}
分割完毕之后,效果是这样的
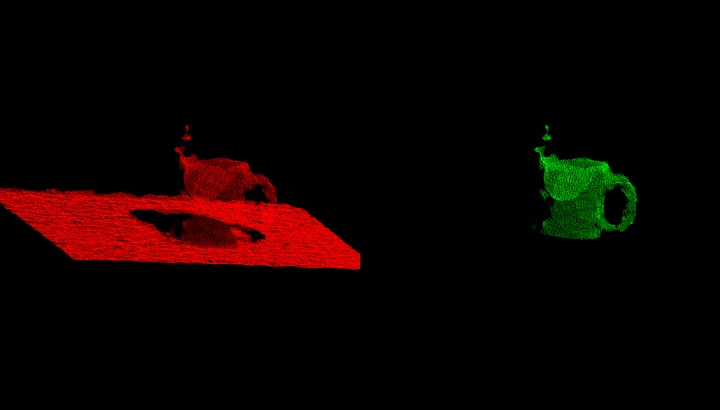
左边是原始点云经过直通滤波之后的样子,是一个平面上放了一个杯子;右边是把杯子给分割出来了。















 1347
1347











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









