







原po:高翔slam十四讲-刚体运动
1.旋转矩阵
考虑一次旋转
- Before: 坐标系(e1,e2,e3), 向量(a1,a2,a3)
- After: 坐标系(e1',e2',e3'), 向量(a1',a2',a3')
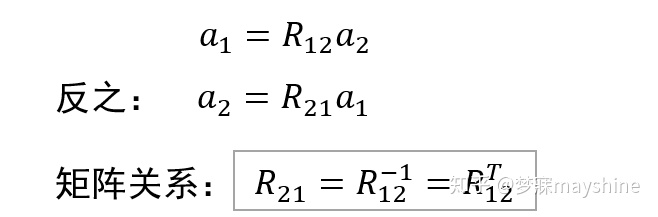
- 即得到a = Ra' R 称为旋转矩阵(R是一个正交矩阵, 行列式为1)

考虑旋转+平移
- 欧拉定理(Euler’s rotation theorem):刚体在三维空间里的一般运动,可分解为刚体上方某一点的平移,以及绕经过此点的旋转轴的转动。
- 即得到a'=Ra+t
2.变换矩阵——考虑多次旋转+平移
- 齐次形式:
- 即得到a'=Ta T为变换矩阵
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4532
4532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









