







今天来说说消费级无人机的姿态估计方法,为什么说无人机的姿态是估计出来的呢?因为目前几乎所有的消费级无人机都没有直接测量姿态的传感器,无法直接得到姿态角。无人机是靠IMU(惯性测量单元)来解算出姿态角的。
IMU又分平台式和捷联式,这里主要说应用于消费级无人机上的捷联式的IMU,捷联式IMU包含加速度计和陀螺仪,输出的是角度增量和比力。所以无人机的姿态角是从陀螺仪给出的角速度积分得到的,无人机姿态解算目前最常用的是四元数法,四元数的微分方程如下:
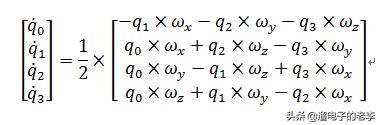
四元数微分方程
由于四元数能表示一个三维空间的旋转,所以这里我们用一个四元数来表示无人机的姿态角,那角度又是怎么从四元数中得到的呢?实际上角度的计算和四元数之间没有固定的计算公式。因为姿态角和机体的旋转顺序有关,和机体的旋转方向有关,和机体的坐标系定义也有关。
旋转顺序对结果的影响
我们通过下面的例子,旋转一本书,看看旋转顺序对最终结果的影响,我们先定义坐标系,如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1758
1758











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









