







本人在用信捷XDH plc ethercat总线,连松下A6B伺服,轴配置完成轴调试时,出现能使能,但
马达不动的情况。
开始总怀疑时信捷PLC的原因,后面查明是输入引脚定义常闭引起的。
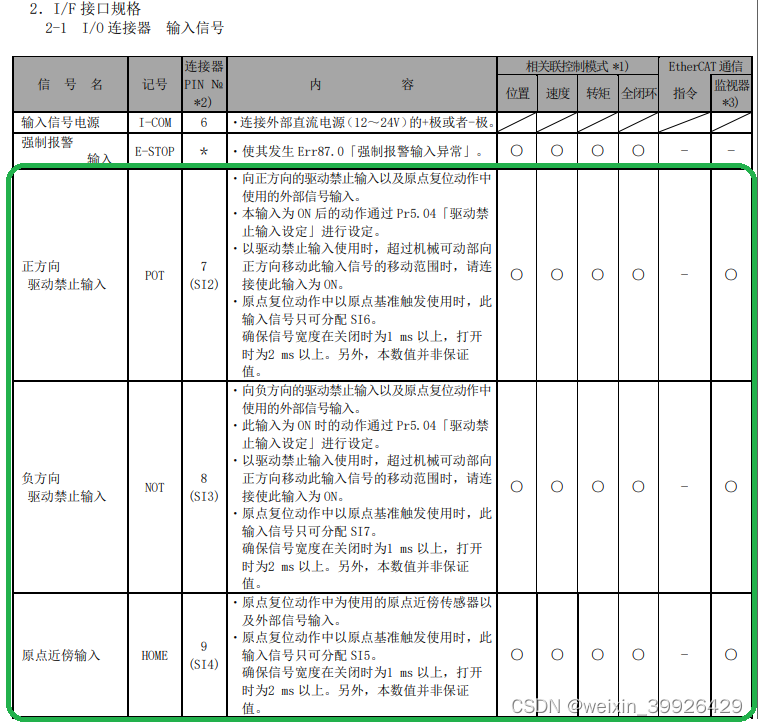
(实际上是伺服驱动器的正限位、负限位、近原点输入信号设为常闭触点,而且没有接线,
所以马达不动,改为无效或常开问题解决)
用USB线连接伺服,打开PANAPARM软件,自动找伺服型号,确定,然后在其它里面点引脚定义设定。
按如下设置
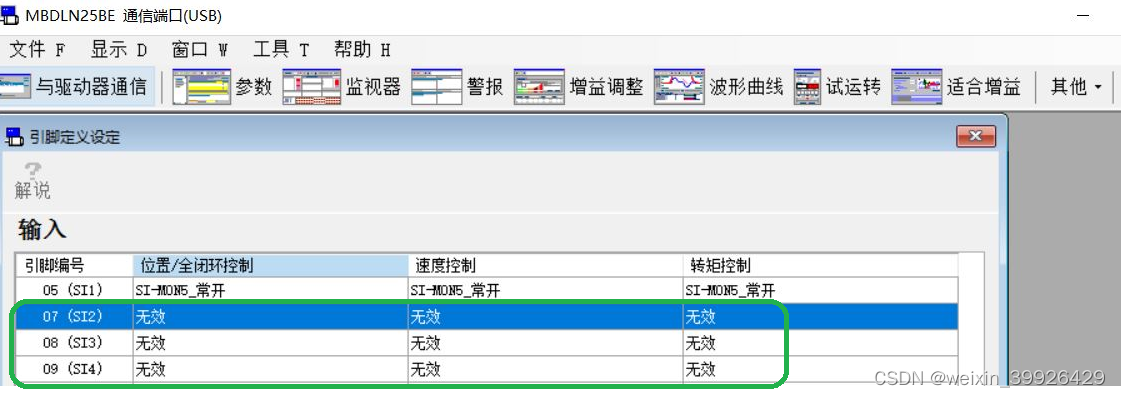
上图把SI2 SI3 SI4 输入屏蔽掉,也即屏蔽掉“正方向驱动禁止输入”,“负方向 驱动禁止输入”、
“原点近傍输入”。
或者改为

也是可以的。
详情见下图“A6B伺服驱动器-基本功能”说明书的18页。
修改完成后,在信捷PLC能调试让伺服马达动,也能用指令让马达动。
另外:可在B站搜索框内输入“ 松下 A6B”,也可直接看如下网址视频
第六讲-松下A6B伺服与欧姆龙适配介绍_哔哩哔哩_bilibili
在右边找到P6 第六讲点进去,然后视频拉到4分钟有讲述。

















 2480
2480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









