






王亚欣 胡明建 李晨阳
0 引言
行星齿轮传动与普通齿轮传动相比较,具有质量小、体积小、结构紧凑、承载能力大、传动效率高、传动比大等优点,已广泛应用于工程机械、矿山机械、冶金机械、起重运输机械、轻工机械、石油化工机械、机床、机器人、飞机和轮船等领域。但是振动与噪声问题一直未能得到很好的解决,使其在传动过程中产生较大的振动、噪声和动载荷,可能导致系统某环节的失灵和损坏,甚至导致齿轮系统本身的破坏和故障。因此,有必要建立行星齿轮系统的动力学模型,深入研究其动力学特性。
根据齿轮系统的具体情况和分析目的,分析模型可以分为三种[1]:非耦合型、啮合耦合型和转子耦合型。非耦合型分析模型仅考虑扭转振动,针对行星传动纯扭转模型进行的研究如下:李同杰[2] 建立了行星齿轮传动系统的纯扭转非线性动力学模型,用于运动状态的稳定性研究和振动强度的稳定性研究;陈会涛等[3] 考虑齿轮时变啮合刚度、综合传递误差等因素建立风力发电机行星齿轮传动系统纯扭转动力学模型,研究综合传递误差的随机波动对风力发电机齿轮传动系统动力学特性的影响;李军等[4] 综合考虑了时变啮合刚度、齿侧间隙、齿轮综合啮合误差、啮合阻尼以及行星轮轴承支承刚度等因素,建立了改进的汇流行星排纯扭转动力学模型;张立军等[5] 建立行星齿轮纯扭转模型,在不同工作模式下进行系统固有特性计算,并进行模态频率和模态振型的对比分析;王世宇等[6] 建立行星齿轮纯扭转模型,进行自由振动固有特性分析、模态跃迁研究;Peeters J L M等[7] 建立行星齿轮纯扭转模性,分析风力涡轮机的传动动力。然而针对行星齿轮弯曲- 扭转模型的相关研究还比较少。因此,本文建立了行星齿轮弯曲- 扭转耦合分析模型,研究该分析模型的固有特性及动态响应。
1 弯曲- 扭转耦合动力学模型
图1 为行星传动弯曲- 扭转耦合动力学模型,模型考虑了各个构件的弯曲和扭转振动,取顺时针为正。模型有三个中心构件和N 个行星轮,中心构件分别为太阳轮(用s 表示)、内齿圈(用r 表示)、系杆(用c 表示),行星轮用p 表示。在定坐标系统中,行星轮的转动关系复杂,既有公转,又有自转,描述起来比较困难,也不利于受力分析。因此,本文将系统模型建立在动坐标系中,OiXiYi (i = s,c,r,p1,p2,…,pn ,…, pN;其中N 表示行星轮个数) 分别为太阳轮、系杆、内齿圈、行星轮的动坐标系,各个构件动坐标系的原点与其几何中心重合。xiyi 以及θi (i = s,c,r,p1,p2, …,pn ,…, pN;其中N 表示行星轮个数) 表示各个构件的平移和扭转弹性变形,kspn(n =1,2,3,…,N)为太阳轮与行星轮n 之间啮合副的外啮合刚度, krpn(n =1,2,3,…,N)为内齿圈与行星轮n 之间啮合副的内啮合刚度,k cp 为行星架- 行星轮支承刚度,kix 、kiy (i = s,c,r,p1,p2,…,pn ,…pN;其中N 表示行星轮个数)分别为各轮支承轴承的x、y 方向支承刚度 ,ki u(i = s,c,r)为各构件绕轴向扭转振动时的扭转振动刚度,θ pn(n =1,2,3,…,N)为行星齿轮的安装角。

图1 行星传动弯曲- 扭转耦合动力学模型
针对行星传动弯曲- 扭转耦合动力学模型做以下说明:1)各个行星轮的质量和转动惯量分别相等,分别用mp 和J p 来表示;2)各个构件的支承轴承的支承刚度均为常值,而且为了贴近实际情况并避免后续计算过于复杂,认为x 和y 方向的支承刚度相等;3)模型考虑了各个构件的弯曲和扭转振动,包括绕自身轴线的回转自由度和垂直于轴线的平面内的两个平移自由度,取顺时针为正;4)为了便于后续计算,将齿轮副啮合线上的位移表示为ui=ri×θi,其中ri(i =s,r,p)表示各齿轮基圆半径,ui 表示系杆、内齿圈、太阳轮和各行星轮的扭转线位移。
1.1 构件间相对位移分析
根据图1 中太阳轮与行星轮之间的相对位置关系,将太阳轮与行星轮的位移向其啮合线方向投影,可以得到太阳轮和行星轮n (n =1,2,…,N)啮合副的轮齿弹性变形;根据内齿圈与行星轮之间的相对位置关系,将内齿圈与行星轮的位移向其啮合线方向投影,可以得到内齿圈与行星轮n (n =1,2,…,N)啮合副的轮齿弹性变形;根据行星架与行星轮之间的相对位置关系,可以得到行星轮两个方向的相对位移。其中,太阳轮和行星轮n (n =1,2,…,N)啮合副的轮齿弹性变形由δ spn 表示;内齿圈与行星轮n (n =1,2,…,N)啮合副的轮齿弹性变形由δ rpn 表示;行星轮与系杆间相对位移沿x pn、y pn 的投影分别由δ cpxn、δ cpyn 表示。δ spn、δ rpn、δ cpxn、δ cpyn 详细表达式如下:
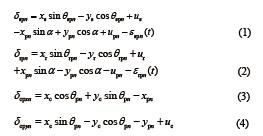
式(1)中:α 表示啮合角,θ spn=α +θ pn(n =1,2,…,N),θ pn 表示第n 个行星轮的安装角,εspn (t ) 为太阳轮和行星轮啮合副的综合啮合误差;式(2)中:θ rpn=α -θ pn (n =1,2,…,N),为内齿圈和行星轮啮合副的综合啮合误差。
1.2 系统运动微分方程
根据牛顿第二定律建立每个构件的运动微分方程。
1)系杆的运动微分方程
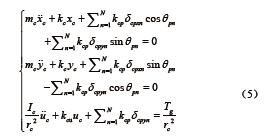
式中:mi 和li(i =s,c,r,p)分别表示太阳轮、系杆、内齿圈以及行星轮的质量和转动惯量,ri(i =s,r,p)表示各齿轮基圆半径,r c 表示行星轮轴心到系杆几何形心的径向距离,T g 表示负载扭矩。
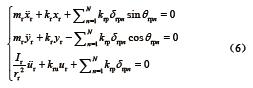
2)内齿圈的运动微分方程
3)太阳轮的运动微分方程
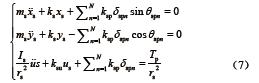
式中:T p 表示输入扭矩。
4)行星轮的运动微分方程
将式(1)– 式(4)中δ spn、δ rpn、δ cpxn、δ cpyn 的表达式代入到方程(5)– 方程(8),并将方程(5)– 方程(8)整理成矩阵形式,得到行星传动弯曲- 扭转分析模型的动力学方程
式中:M 表示系统的质量矩阵,K 表示系统的刚度矩阵,X 表示位移矩阵,X 表示加速度矩阵,F 表示载荷矩阵。
式中:M 表示系统的质量矩阵,K 表示系统的刚度矩阵,X 表示位移矩阵,X 表示加速度矩阵,F 表示载荷矩阵。
2 系统的固有特性
给定如表1 所示的行星齿轮传动系统基本参数,并输入初始值功率1 090 kW、转速为12 300 r/min、负载扭矩3 191.53 N · m。求解方程(9)的特征值和特征向量,即可得出系统的各阶固有频率和相应振型。
多自由度线性振动系统微分方程的一般表达式为

式中:M、C、K 分别为n×n 阶阶的质量、阻尼和刚度矩阵, 和Q 分别为广义坐标、广义速度、广义加速度和广义力的n 维向量。
和Q 分别为广义坐标、广义速度、广义加速度和广义力的n 维向量。
对于无阻尼的自由振动,方程(10)可以表示为
对于n 个联立的齐次方程一定存在着同步运动的解,即在运动过程中,所有坐标应具有对时间相同的依赖关系,并除振幅外,运动的一般形状并不改变,即各质量位移的比值保持不变。在数学上,这一类运动可以表示为


将方程(13)代入方程(12),并注意到函数f (t )不依赖于下标j ,有

将其写成如下形式

在上式中分离开了与时间有关的部分和位置有关的部分,可以看出,方程(15)的左边不依赖于下标j ,而右边不依赖于时间t ,因而两个比值一定等于常数,而且这个常数是一正实数,令常数λ =ω 2,于是有

把方程(16)写成矩阵形式

方程(17)是关于矩阵M 和K 的特征值问题。方程(17)存在非零解的条件是:当且仅当系数行列式等于0,即

式中Δ(ω 2 )称为特征行列式,而方程(18)称为特征方程或频率方程,将其展开后得到ω 2 的n 次代数方程式,n 次代数方程式有n 个根ωr2(r =1,2,…,n ),这些根称为特征值,它们的平方根ωr(r =1,2,…,n )称为系统的固有频率。将求得的固有频率ω r (r =1,2,…,
n )分别代入方程(17)得

解此特征值问题,可得到非零向量u (r ) =[u 1(r )u 2(r )…un(r )]T(r =1,2,…,n )。称向量u (r ) 为对应特征值ωr2 的特征向量,也称为振型向量或模态向量,它表示所谓的固有振型。经计算得到如表2 所示行星齿轮传动的固有频率。

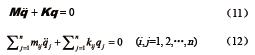
限于篇幅,文中没有列出固有频率对应的振型坐标。但对振型坐标进行观察归纳可知,系统振动模式可以分为三类:中心轮横向振动、中心轮扭转振动、行星轮振动。图2 给出了三种振动模式的振型图。
观察图2 所示的三种振型模式的特点,可以归纳出如下结论:中心轮横向振动(图2a)的特征是各中心构件仅作横向振动;中心轮扭转振动(图2b)的特征是各中心构件仅作扭转振动,并且各行星轮在三个方向上的振动状态相同;行星轮振动(图2c)的特征是只有行星轮出现振动而各中心构件并没有发生振动。
3 系统动态响应
采用Newmark 积分法对行星传动弯曲- 扭转耦合动力学模型进行求解, 可以获得动态啮合力的响应。太阳轮与行星轮之间的外啮合力 内齿圈与行星轮之间的内啮合力
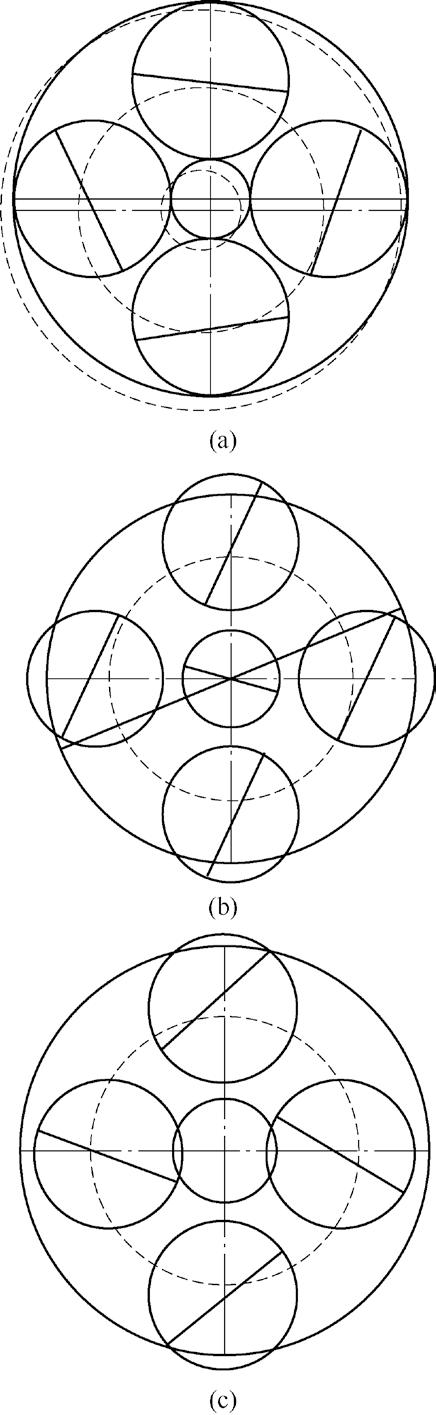
内齿圈与行星轮之间的内啮合力 图3a所示为不同行星轮与太阳轮之间的外啮合力,图3b 所示为不同行星轮与内齿圈之间的内啮合力。图4 所示为不同载荷下,太阳轮与行星轮1 之间的外啮合力以及内齿圈与行星轮2 之间的内啮合力。
图3a所示为不同行星轮与太阳轮之间的外啮合力,图3b 所示为不同行星轮与内齿圈之间的内啮合力。图4 所示为不同载荷下,太阳轮与行星轮1 之间的外啮合力以及内齿圈与行星轮2 之间的内啮合力。
(a)中心轮横向振动 (351.130 2 Hz)
(b)中心轮扭转(416.450 1 Hz)
(c)行星轮振动(5 148.594 4 Hz)
图2 行星传动的振动模式
从图3a 可知,外啮合副1 的啮合力的最小值为177.6 N,最大值为364.1 N;外啮合副2 的啮合力的最小值为143.5 N,最大值为362.9 N;外啮合副3 的啮合力的最小值为135.9 N,最大值为322.8 N;外啮合副4的啮合力的最小值为136.8 N,最大值为356.8 N。从图3b 可以知道,内啮合副1 的啮合力的最小值为182.5N,最大值为361.8 N;内啮合副2 的啮合力的最小值为140.2 N,最大值为357.2 N;内啮合副3 的啮合力的最小值为138.5 N,最大值为317.7 N;内啮合副4 的啮合力的最小值为139.9 N,最大值为357.03 N。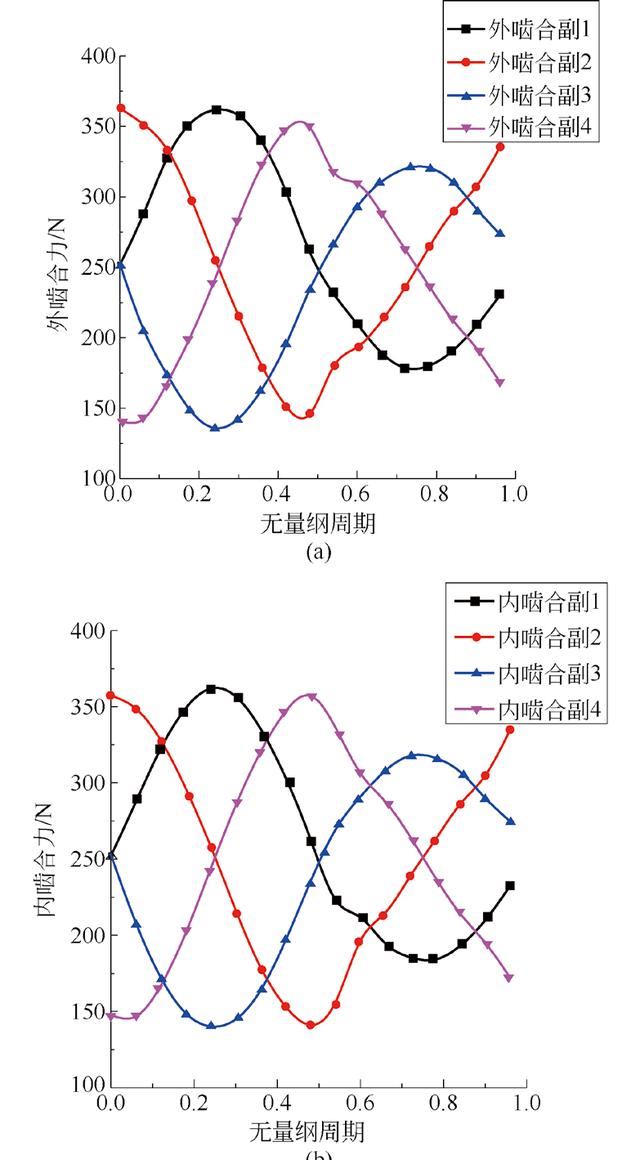
(a)外啮合力 (b)内啮合力
图3 内、外啮合力的动态响应
进一步了解系统其他参数不变的情况下,不同载荷对整个系统动态响应的影响,得到如图4 所示的结果。图4 没有列出不同载荷下的所有啮合副的内、外啮合力变化,仅给出齿轮副1 外啮合力和齿轮副2 内啮合力的变化。分析图4a 可知,当载荷不同时,外啮合力不同,但变化趋势基本相同,并且随着载荷的增加,外啮合力也增加。分析图4b 可知,当载荷不同时,内啮合力不同,但变化趋势基本相同,并且随着载荷的增加,内啮合力也增加。
4 结论
1)本文建立了行星传动弯曲- 扭转耦合动力学模型。基于此模型分析了行星传动的固有特性,揭示了传动的三种振动模式:中心轮横向振动、中心轮扭转、行星轮振动,并通过观察振型坐标归纳了三种振动模式下行星传动的振动特征。
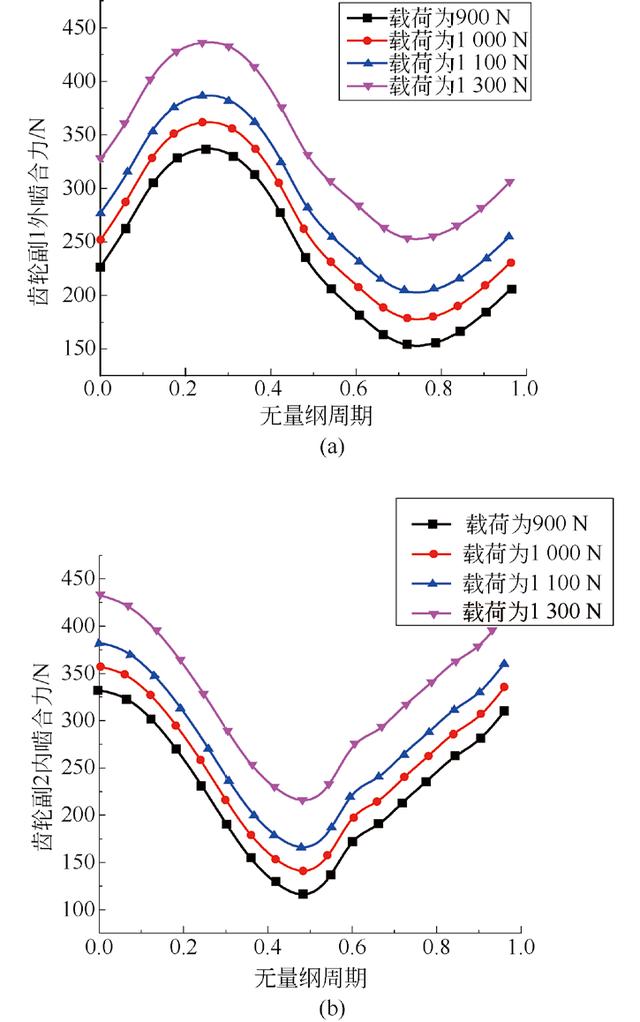
(a)齿轮副1 外啮合力
(b)齿轮副2 内啮合力
图4 不同载荷下,啮合力的变化
2)固有特性分析中获知了固有频率,为设计者调整系统的设计参数提供了依据,使传动系统避开其共振点。
3)采用Newmark 积分法对行星传动弯曲- 扭转耦合动力学模型进行求解,获得动态啮合力的响应。并考察不同载荷对动态响应的影响,在其他参数不变的情况下,载荷不同时,啮合力不同,但它们的变化趋势相同,且随着载荷的增加,啮合力也增加。

















 5211
5211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









