







 超级会员免费看
超级会员免费看
四足机器人运动控制相关教程及博客请关注专栏:
https://blog.csdn.net/qq_35635374/category_11523325.html
本文先对一种低成本的动态机器人模块化电机执行器做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、简介
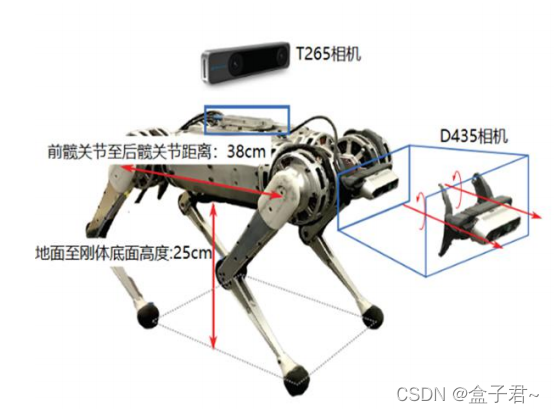
本文介绍了一种低成本、高性能、模块化执行机构,用于腿型机器人和其他动态机械结构
我们采取与麻省理工学院猎豹机器人一样的驱动方式:使用高扭矩密度电机和低传动比、可反向驱动的变速器,允许高带宽扭矩控制。利用这些执行器,我们建造了一个12自由度的四足机器人,大约是麻省理工学院猎豹3号机器人的60%,还有其他几个机器人平台。
【防盗标记–盒子君hzj】
.
.

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











