






代码下载链接:https://download.csdn.net/download/weixin_40723264/88011324
一、整体网络
本文结合YOLOv5网络进行讲解,通过与YOLOv5网络进行比较,进一步理解YOLOv8,尽快上手。
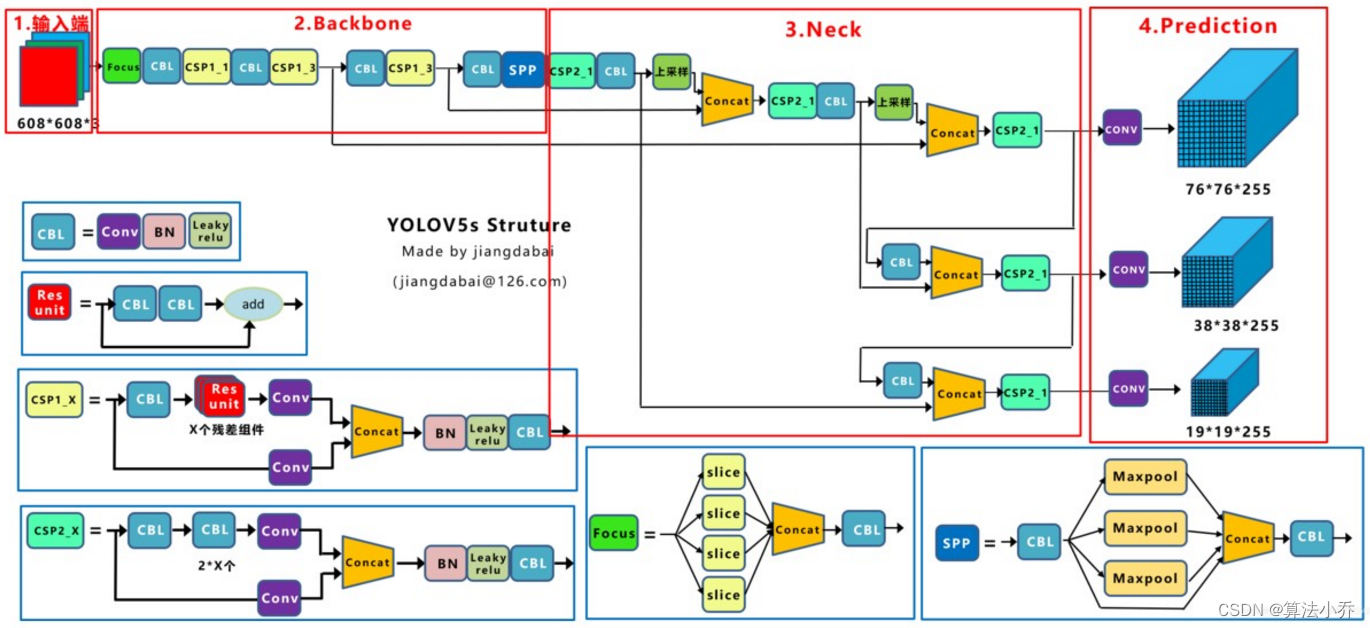
(1) YOLOv5
(2)YOLOv8
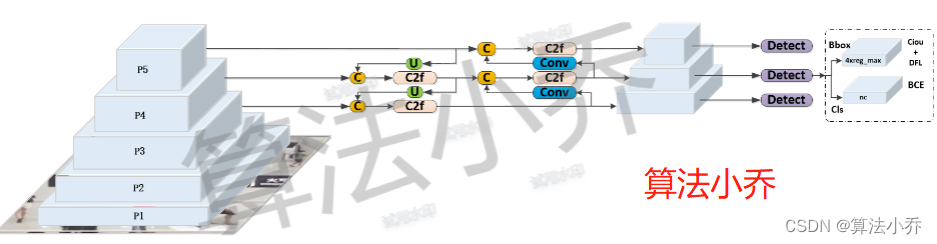
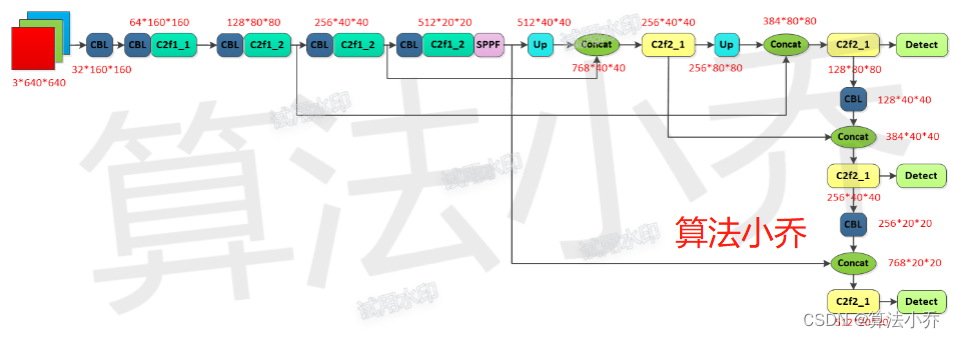
<1> 大体结构
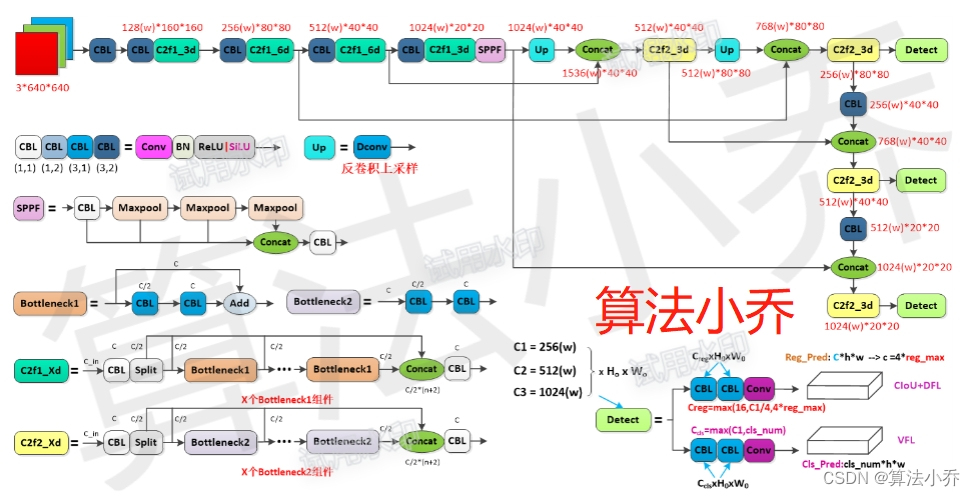
<2> 详细结构
<3> 实例展示
上图中的d和w分别代表不同类型YOLOv8网络(yolov8n、yolov8s、yolov8m、yolov8l)的深度和网络的宽度的比率,如下所示:
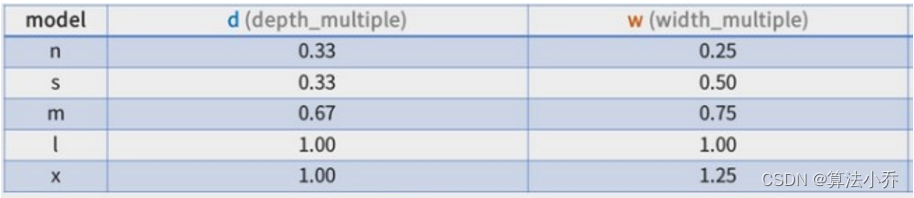
下面以yolov8s为例,其中d = 0.33, w=0.5,计算过程中向上取整。
二、比较
(1)YOLOv8与YOLOv5比较
相同点:
从整体上来看,YOLOv8和YOLOv5基本一致,都是backbone + PANet + Head的结构,且PANet部分都是先上采样融合再下采样融合;
不同点:
<1> Head部分不同,YOLOv5是整体上输出的,以80类为例,因为每个像素点为3个anchor,故每个像素点的size为:3*(4 + 1 + 80 )= 255;而YOLOv8Head部分,Cls和Box是分开预测的,并且从Anchor-Based换成了Anchor-Free。
yolov8中提到的anchors与yolov5有本质的区别,在yolov8中只是一个锚点,即预测的中心点或者可以理解为每个像素的中心点,并且yolov8中,每个像素只有一个锚点,例如,yolov8 输出共有 80*80 + 40*40 20*20 = 8400个锚点。
<2> YOLOv8的Backbone和Neck中采用的C2f结构,其参考了YOLOv7的ELAN的设计思想,用于替换YOLOv5中的CSP结构,由于C2f结构有着更多的残差连接,所以其有着更丰富的梯度流。(不过这个C2f模块中存在Split操作,对特定硬件部署并不友好)
<3> Loss 计算方面采用了TaskAlignedAssigner正样本匹配策略,并引入了Distribution Focal Loss.
<4> 训练部分,采用了YOLOX的训练方式,在最后的10个Epoch关闭了Mosiac增强操作,可以有效地提升精度
(2) 庖丁解牛
<1> CSP 到 C2f
a. YOLOv5中的CSP结构如下所示:
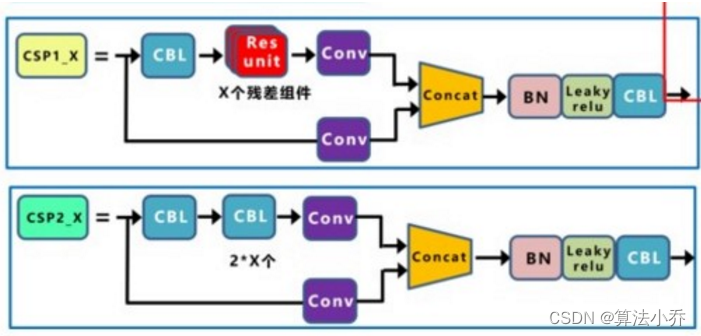
CSP在Backbone与Neck中是不同的,
在Backbone中为CSP1_X,其X个组件为残差结构,如下图所示,其中两个CBL输入与输出的Shape是相同的。

在Neck中为CSP2_X,其X组件为2*X个CBL模块,每对CBL的输入输出Shape都是相同的。
b. YOLOv8中的C2f结构如下所示,可以发现与CSP相比,其增加了更多的跳层连接和额外的Split操作。

C2f在Backbone和Neck中也是不同的,
在Backbone中为C2f1,其X个组件为是带有残差边的残差模块,如下图所示,其中第一个CBL通道数减少一半,第二个又恢复到C。
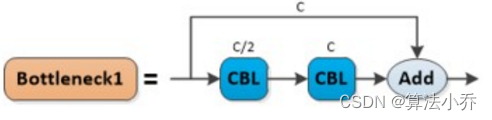
在Neck中为C2f2,其X个组件没有残差边,如下图所示,

<2> 从SPP变到SPPF

SPPF较SPP,可以在一定程度上降低计算量,并且增大感受野。
用两个2个5x5代替9x9,用3个5x5代替13x13.
<3> Head从耦合头变为解耦头
从YOLOv5的耦合Head,变为的解耦Head,并且由Anchor-Based 变成了Anchor-Free,如下所示:
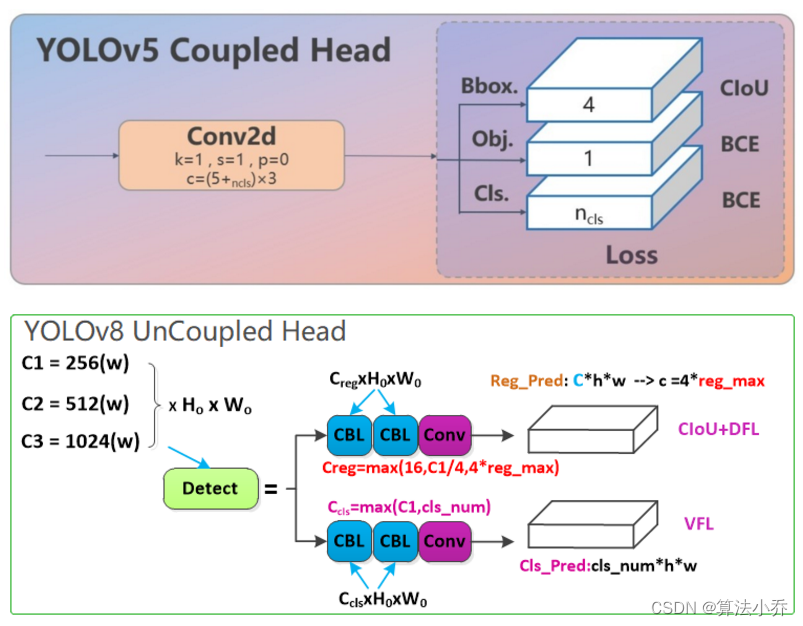
可以看出,YOLOv8的Head中,不再有之前的Obj 分支,只有解耦的分类和回归分支,并且回归分支使用了Distribution Focal Loss中提到的积分形式表示法。
同时,从上图YOLOv8 Head可以看出,解耦头中的Cls类别分支和box 回归分支的通道数是不相等的,因为各自表征了两种不同的特征,因此:
a. 对于Cls类别分支,其通道数Ccls = max(C1,cls_num)
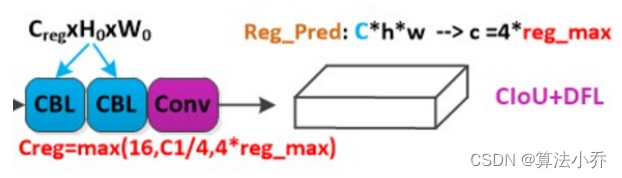
b. box回归分支,其通道数Creg = max(16,C1/4,4*reg_max)
以COCO数据集为例,则解耦头的通道数配置为:
Ccls = max(256,80) = 256
Creg = max(16,256/4,4*16) = 64 ; 其中reg_max = 16
三、正负样本筛选
既然YOLOv8没有了anchor box,那么正负样本的匹配就需要依赖于多尺度分配。
(1) 匹配策略
YOLOv8的正负样本匹配策略采用的是Task-Aligned Assigner,(顾名思义就是对齐分配器),那是怎样的对齐方式呢?
根据分类与回归的分数,作为加权分数,选择正样本。公式如下:
其中,S是GT的预测分值,U是预测框和GT Box的iou,α和β为权重超参数,两者相乘就可以衡量对齐程度,当Cls的分值越高且IOU越高时,t的值就越接近于1.
通过训练t可以引导网络动态的关注于高质量的正样本。
a. 对于每个GT,对所有预测框基于该GT的类别cls score 结合 与该GT box的 IOU,加权得到一个关联Cls及Box Reg的对齐分数alignment_metrics。
b. 对于每个GT,直接基于alignment_metrics对齐分数,通过排序后,选取topK个预测框作为正样本。
(2) 损失函数
Loss包括2个分支:Cls 与 Box Reg,并没有之前的Obj 前景/背景 的分支。
<1> 分类损失 Lcls
使用sigmoid函数来计算每个类别的概率,并计算全局的类别损失。
采用 VFL Loss 或 BCE Loss
a. VFL
其训练(学习)标签: 正样本的类别标签就是IOU值(0 ~1)因为采用的sigmoid;负样本的学习标签全为0.
与Focal Loss相比,提出了非对称的加权操作,Focal Loss中的加权是对称的(正负样本都进行同等规则的加权)。公式如下:

其中,q为label,正样本的时候q为预测bbox和GT的IoU,负样本时q=0。
如上面公式,当为正样本的时候没有采用Focal Loss,而是普通的BCE Loss,只不过多了一个自适应的IOU加权,用于突出主样本(在正样本范围内,主样本的IOU值最大)。
负样本采用的是Focal Loss。
可见VFL是对正负样本进行非对称加权,突出主样本。
b. BCE
从 工程代码中,发现YOLOv8实际采用的是BCE损失,如下图所示:

说明,YOLOV8团队应该是对VFL和BCE都尝试过,但最终发现使用VFL和使用普通的BCE效果相当,优势不明显,故采用了简单的BCE Loss。
<2> 回归损失 Lbox
对于位置损失,YOLOv8分为两个部分CIou_Loss + Distribution Focal Loss(DFL Reg_max默认为16)默认为16。
第一部分就是计算预测框与目标框之间的IOU,一如既往地采用了CIOU Loss,而第二部分采用地就是DFL.
DFL Loss:
其主要是将框的位置建模成一个general distribution,让网络快速的聚焦于和目标位置距离近的位置的分布。
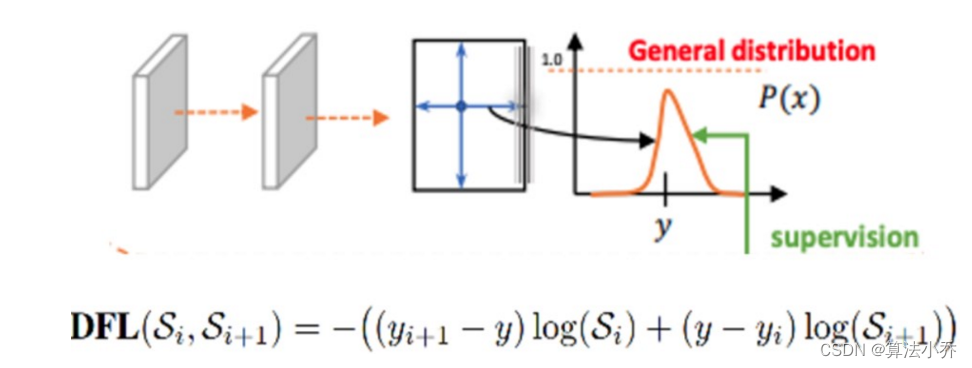
DFL 能够让网络更快地聚焦于目标y附近的值,增大它们的概率。
DFL的含义是以交叉熵的形式去优化与标签y最接近的一左一右2个位置的概率,从而让网络更快地聚焦到目标位置的邻近区域的分布;也就是说学出来的分布,理论上是在真实浮点坐标的附近,并且以线性插值的模式得到距离左右整数坐标的权重。
问题:上面提到需要将bbox的预测,建模成一个任意分布,通过对该任意分布进行回归,来得到边界框。那么这个任意分布是如何建立的?
由上图可见,bboxes预测输出通道为C,如reg_max=16, 则通过这16个值建模一个类似于高斯的分布(只能说是类似,其参数值在训练过程中是不断更新的)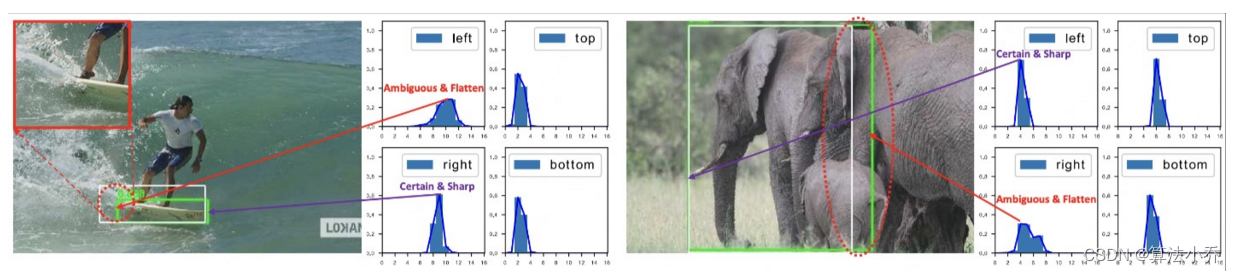
如上图左侧所示,对于滑板左侧被水花模糊,故左侧边界的预测分布是任意而扁平的,对右侧边界的预测分布是明确而尖锐的。右侧的大象预测同理。
所以对于边界的预测,围绕GT位置结合周围位置,采类似高斯用任意分布进行处理,我们可以回忆一下高斯函数:
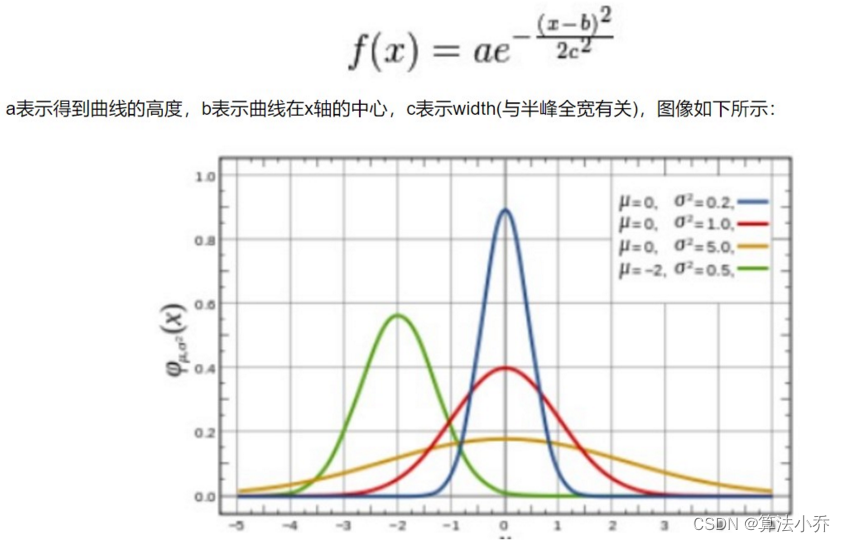
通过16个值对分布进行离散化处理,可见GT位置的值是最大的,两边的值是逐渐变小的,结合高斯函数我们如何对离散的分布进行处理呢?
可以用softmax,实现离散回归,从结构上来讲,softmax的公式计算与高斯函数是相似的,而且在代码中方便应用。
最后通过对分布进行积分处理,就得到了bbox坐标四个预测值的结果。
tip:讲到这,突然想到,yolov8对坐标预测的采用任意分布的方式,与yolor 预测采用隐性知识向量,有着异曲同工之妙。


















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









